Методы идентификации человека по походке в видео | Соколова
1. Arseev S., Konushin A., Liutov V. Human Recognition by Appearance and Gait. Programming and Computer Software, vol. 44, issue 4, 2018, pp. 258–265
2. Khalid Bashir, Tao Xiang, Shaogang Gong. Gait recognition using gait entropy image. In Proc. of the 3rd international conference on crime detection and prevention, 2009, pp. 1–6.
3. Belhumeur P.N., Hespanha J.P., Kriegman D.J. Eigenfaces vs. fisherfaces: Recognition using class specific linear projection. IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 19, no. 7, 1997, pp. 711–720.
4. Chen C., Liang J., Zhao H., Hu H., Tian J. Frame difference energy image for gait recognition with incomplete silhouettes. Pattern Recognition Letters, vol. 30, no. 11, 2009, pp 977–984.
5. Francisco Manuel Castro, Manuel J. Marín-Jiménez, Nicolás Guil, Nicolás Pérez de la Blanca. Automatic learning of gait signatures for people identification. Lecture Notes in Computer Science, vol. 10306, 2017. pp. 257–270.
Lecture Notes in Computer Science, vol. 10306, 2017. pp. 257–270.
6. Francisco M. Castro, Manuel J. Marín-Jiménez, Rafael Medina Carnicer. Pyramidal Fisher Motion for multiview gait recognition. In Proc. of the 22nd International Conference on Pattern Recognition, 2014, pp. 1692–1697.
7. Dalal N., Triggs B. Histograms of oriented gradients for human detection. In Proc. of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), vol. 01. 2005. pp. 886–893.
8. Deng M., Wang C., Cheng F., Zeng W. Fusion of spatial-temporal and kinematic features for gait recognition with deterministic learning. Pattern Recognition, 2017, 67, pp. 186 – 200
9. Feng Y., Li Y., Luo J. Learning effective gait features using LSTM. In Proc. of the 23rd International Conference on Pattern Recognition (ICPR), 2016, pp. 325–330.
10. He Y., Zhang J., Shan H., Wang L. Multitask gans for view-specific feature learning in gait recognition. IEEE Transactions on Information Forensics and Security, vol. 14, no. 1, 2019, pp. 102–113.
14, no. 1, 2019, pp. 102–113.
11. Han J., Bhanu B. Individual recognition using gait energy image. IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 28, issue 2, 2006, pp. 316–322.
12. Hofmann M., Geiger J., Bachmann S., Schuller B., Rigoll G. The TUM Gait from Audio, Image and Depth (GAID) database: Multimodal recognition of subjects and traits. Journal of Visual Communication and Image Representation, vol. 25, no. 1, 2014, pp.195 – 206.
13. Iwama H., Okumura M., Makihara Y., Yagi Y. The OU-ISIR Gait Database Comprising the Large Population Dataset and Performance Evaluation of Gait Recognition. IEEE Transactions on Information Forensics and Security, vol. 7, issue 5, 2012, pp.1511–1521.
14. Laptev I., Marszalek M., Schmid C., Rozenfeld B. Learning Realistic Human Actions from Movies. In Proc. of the CVPR 2008 – IEEE Conference on Computer Vision & Pattern Recognition, 2008, pp. 1–8
15. Li C., Sun S., Chen X., Min X. Cross-view gait recognition using joint Bayesian. In Proc. of the Ninth International Conference on Digital Image Processing (ICDIP 2017), 2017.
In Proc. of the Ninth International Conference on Digital Image Processing (ICDIP 2017), 2017.
16. Liu Y., Zhang J., Wang C., Wang L. Multiple HOG templates for gait recognition. In Proc. of the 21st International Conference on Pattern Recognition (ICPR2012). 2012. pp. 2930–2933
17. Makihara Y., Sagawa R., Mukaigawa Y., Echigo T., Yagi Y. Gait recognition using a view transformation model in the frequency domain. Lecture Notes in Computer Science, vol. 3953, 2006, pp. 151–163.
18. Makihara Y., Suzuki A., Muramatsu D., Li X., Yagi Y. Joint intensity and spatial metric learning for robust gait recognition. In Proc. of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017, pp. 6786–6796
19. Mansur A., Makihara Y., Muramatsu D., Yagi Y. Cross-view gait recognition using view-dependent discriminative analysis. In Proc. of the 2014 IEEE/IAPR International Joint Conference on Biometrics, 2014.
20. M.J. Marín-Jiménez, F.M. Castro, N. Guil, F. de la Torre, R. Medina-Carnicer. Deep multitask learning for gait-based biometrics. In Proc. of the IEEE International Conference on Image Processing (ICIP), 2017.
de la Torre, R. Medina-Carnicer. Deep multitask learning for gait-based biometrics. In Proc. of the IEEE International Conference on Image Processing (ICIP), 2017.
21. Muramatsu D., Makihara Y., Yagi Y. View transformation model incorporating quality measures for cross-view gait recognition. IEEE transactions on cybernetics, 2016, vol. 46, issue 7, pp. 1602–1615.
22. Muramatsu D., Makihara Y., Yagi Y. Crossview gait recognition by fusion of multiple transformation consistency measures. IET Biometrics, vol. 4, issue 2, 2015, pp. 62–73.
23. Shiraga K., Makihara Y., Muramatsu D., Echigo T., Yagi Y. GEINet: View-invariant gait recognition using a convolutional neural network. In Proc. of the 2016 International Conference on Biometrics (ICB), 2016, pp. 1–8.
24. Simonyan K., Zisserman A. Two-stream convolutional networks for action recognition in videos. In Proc. of the of the 27th International Conference on Neural Information Processing Systems, vol. 1 of NIPS’14, 2014, pp. 568–576.
568–576.
25. Sokolova A., Konushin A. Gait recognition based on convolutional neural networks. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. vol. XLII-2/W4, 2017. pp. 207–212.
26. Sokolova A. and Konushin A. Pose-based Deep Gait Recognition. IET Biometrics, 2018
27. Takemura N., Makihara Y., Muramatsu D. On input/output architectures for convolutional neural network-based crossview gait recognition. IEEE Transactions on Circuits and Systems for Video Technology, 2017.
28. Thapar D., Nigam A., Aggarwa, D., Agarwal P. VGR-net: A view invariant gait recognition network. In Proc. of the EEE 4th International Conference on Identity, Security, and Behavior Analysis (ISBA), 2018, pp. 1-8.
29. Tong S., Fu Y., Ling H., Zhang E. Gait identification by joint spatial-temporal feature. Lecture Notes in Computer Science, vol. 10568, 2017, pp. 457–465.
30. Whytock T., Belyaev A., Robertson N.M. Dynamic distance-based shape features for gait recognition. Journal of Mathematical Imaging and Vision, vol. 50, no. 3, 2014, pp. 314–326.
Journal of Mathematical Imaging and Vision, vol. 50, no. 3, 2014, pp. 314–326.
31. Wu Z., Huang Y., Wang L., Wang X., Tan T. A comprehensive study on cross-view gait based human identification with deep cnns. IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 2, 2016, pp. 209–226.
32. Yang Y., Tu D., Li G. Gait recognition using flow histogram energy image. In Proc. of the 22nd International Conference on Pattern Recognition, 2014, pp. 444–449
33. Yu S., Chen H., Reyes E. B. G., Poh, N. GaitGAN: Invariant Gait Feature Extraction Using Generative Adversarial Network. In Proc. of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2017, pp 532–539
34. Yu S., Chen H., Wang Q., Shen L., Huang Y. Invariant feature extraction for gait recognition using only one uniform model. Neurocomputing, vol. 239, 2017, pp. 81 – 93
35. Yu S., Tan D., Tan T. A Framework for Evaluating the Effect of View Angle, Clothing and Carrying Condition on Gait Recognition. In Proc. of the 18th International Conference on Pattern Recognition (ICPR), vol. 4, 2006, pp. 441–444
In Proc. of the 18th International Conference on Pattern Recognition (ICPR), vol. 4, 2006, pp. 441–444
36. Zhang C. Liu W., Ma H., Fu H. Siamese neural network based gait recognition for human identification. In Proc. of the IEEE International Conference on Acoustics, Speech and Signal Processing, 2016, pp. 2832-2836.
37. Zhang X., Sun S., Li C., Zhao X., Hu Y. Deepgait: A learning deep convolutional representation for gait recognition. Lecture Notes in Computer Science, vol. 10568, 2017, pp. 447–456.
Ценная походка: создан экзоскелет, «растущий» вместе с ребенком | Статьи
Российские ученые создали экзоскелет, который сможет диагностировать нарушения в работе опорно-двигательного аппарата, а также будет использоваться для реабилитации больных с такими диагнозами. Электроника устройства проанализирует ходьбу здоровых людей и сформирует портрет идеальной походки. Именно с ней система будет сравнивать манеру ходьбы пациентов. В случае заметных отклонений от стандарта специальные моторы начнут корректировать движения больного.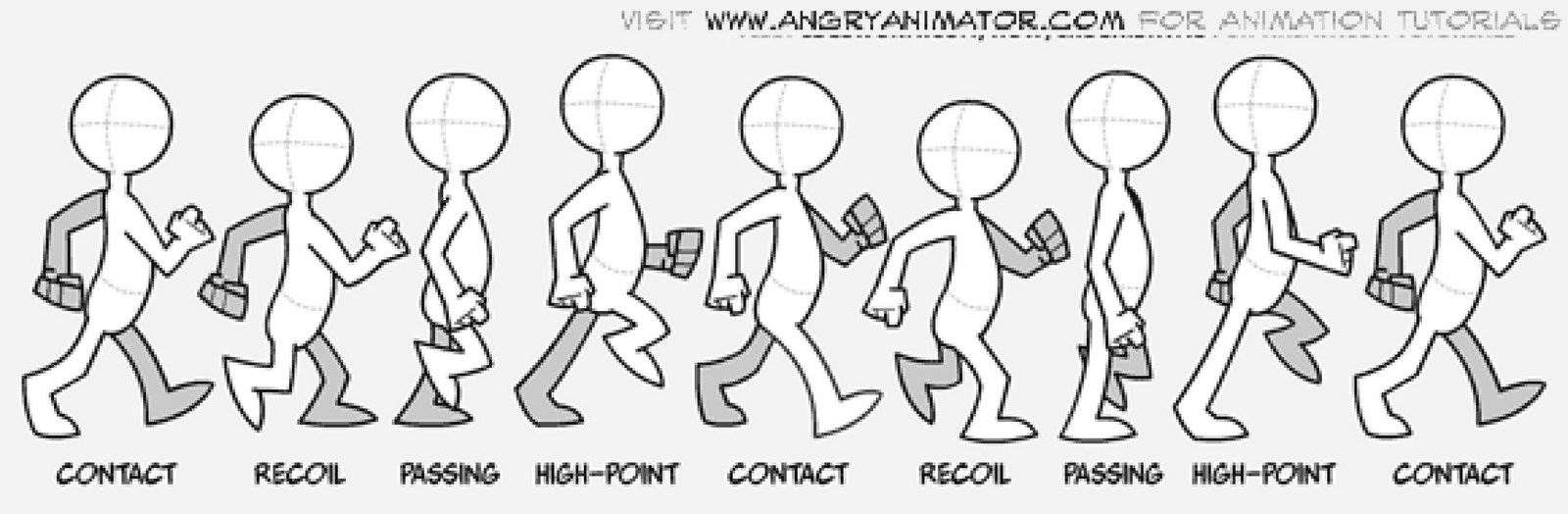 По мнению специалистов, разработка может значительно облегчить труд врачей-реабилитологов.
По мнению специалистов, разработка может значительно облегчить труд врачей-реабилитологов.
Специалисты Московского политеха совместно с компанией «Полдень. 21-й век» работают над созданием экзоскелета для диагностики и лечения болезней опорно-двигательного аппарата. В первую очередь его предполагают использовать для работы с детьми. С помощью изобретения можно будет оценить, насколько походка пациента соответствует здоровому идеалу, измерить объективные показатели, которые характеризуют его индивидуальный стиль ходьбы, а также научить человека правильно ходить. Выпустить на рынок свое изобретение инженеры хотят уже в 2024 году.
— По предварительным расчетам, наши экзоскелеты будут стоить как минимум втрое дешевле, чем существующие на рынке аналоги, — сказал руководитель исследовательской группы и магистерской программы «Роботизированные беспилотные системы и эргономика» Московского политехнического университета Илья Таратонов.
Проект по созданию экзоскелета включает в себя несколько этапов.
Фото: Московский Политех
Специалисты политеха стремятся создать устройство, которое будет способно контролировать походку по объективным показателям. Врачи смогут использовать его точно так же, как кардиолог использует кардиограмму. С помощью скелета можно будет понять, например, что человек слишком далеко выставляет ногу либо, наоборот, отставляет ее назад.
Как рассказали ученые, законы кинематики (раздел механики, который описывает движение) говорят, что походка людей совпадает только на 70%, а остальные 30% определяются индивидуальным стилем.
По словам разработчиков скелета, многие даже здоровые люди всю жизнь ходят неправильно. Вред от этого до определенного момента компенсируется за счет жизненных сил организма. Однако рано или поздно такая ходьба приводит к болезням суставов, головным болям, заболеваниям сердечно-сосудистой системы и другим осложнениям. Экзоскелет поможет выявить нарушения в походке и в таких случаях.
На следующем этапе скелет используют, чтобы зафиксировать особенности ходьбы у детей с ДЦП и создать их «портреты» со всеми численными показателями, которые фиксируют датчики.
 За 15 минут посещения пациента лечащий специалист получит конкретные цифры, по которым сможет судить, есть ли прогресс в лечении или его стоит поменять, рассказали в Московском политехе.
За 15 минут посещения пациента лечащий специалист получит конкретные цифры, по которым сможет судить, есть ли прогресс в лечении или его стоит поменять, рассказали в Московском политехе.После того как диагностическая функция устройства будет отработана, инженеры займутся его настройкой для коррекции походки. Для этого в конструкцию скелета включены моторы. Если пациент ходит неправильно, двигатели будут корректировать его движения. В конечном счете задача пользователя будет сводиться к тому, чтобы моторы при ходьбе ему не мешали. Это будет происходить интуитивно, поэтому специальное обучение пациента не требуется.
Подходящий размерОсобенность работы с детьми в том, что они быстро растут, поэтому оборудование должно увеличиваться в размерах вместе с ними. Сохраняя одну программно-аппаратную часть и электронику, конструкция позволяет менять отдельные детали скелета и тем самым регулировать его высоту. По словам разработчиков, за сутки с помощью 3D-принтера они могут распечатать скелет для любого ребенка ростом до 1,5 м.
— Мы формируем унифицированный экзоскелетный комплекс, позволяющий менять размеры по мере роста нашего маленького пациента и адаптировать под него лечение, — сказал Илья Таратонов.
Диагностика с помощью устройства будет занимать не более 15 минут. Она будет проводиться с использованием специальной беговой дорожки, имитирующей любые препятствия. А во время лечения ребенок может оставаться в устройстве сколь угодно долго.
Фото: Московский Политех
Однако, по мнению специалистов компании Muscles.AI, которая занимается разработкой специального костюма для анализа движений и реабилитации пациентов с болезнями опорно-двигательного аппарата, особенности конструкции экзоскелетов в принципе не позволяют использовать эти устройства для диагностики.
— Экзоскелет накладывает ограничения на движения и меняет их механику. То есть специалисты диагностируют не движения человека, а движения экзоскелета. Если же разработка позволяет двигаться абсолютно свободно, то это уже не экзоскелет, а носимая технология — программно-аппаратный комплекс того типа, что делаем мы, — сказал технический директор компании Виталий Улыбин.
То есть специалисты диагностируют не движения человека, а движения экзоскелета. Если же разработка позволяет двигаться абсолютно свободно, то это уже не экзоскелет, а носимая технология — программно-аппаратный комплекс того типа, что делаем мы, — сказал технический директор компании Виталий Улыбин.
Разработанный специалистами Московского политеха экзоскелет будет эффективен для работы со взрослыми пациентами, перенесшими травмы, или детьми старшего возраста, больными ДЦП, уверена специалист по детской реабилитации Наталья Пыхтина.
— К сожалению, на самых маленьких пациентов возрастом около года экзоскелет не наденешь, поэтому приходиться делать с ними упражнения вручную, — сказала Наталья Пыхтина.
Но когда пациенты становятся старше и увеличивается их вес, то экзоскелет может заметно облегчить труд реабилитолога, резюмировала специалист.
Цикл походки: фазы, параметры для оценки и технология | Анализ цикла походки
Что такое походка?
Чтобы по-настоящему понять патологии или травмы при передвижении человека, мы должны сначала понять методы, которыми должен двигаться наш пациент или спортсмен. Походка (ходьба или бег) обычно считается способом перемещения из точки А в точку Б. Оценка походки помогает понять конкретные асимметрии, связанные с тем, как мы двигаемся. Измерение походки может быть выполнено с использованием кинетической (силовой) и кинематической (пространственной/временной) информации. Стандартная оценка походки требует, по крайней мере, одного полного цикла ходьбы, который включает в себя приземление стопы наблюдаемой ногой, приземление контралатеральной стопы другой ногой, за которым следует еще одно приземление стопы наблюдаемой ногой. Конечно, чем больше проанализировано ударов ногой, тем лучше будет приспособиться к постоянному набору естественных ударов ступней из-за присущей им изменчивости.
Походка (ходьба или бег) обычно считается способом перемещения из точки А в точку Б. Оценка походки помогает понять конкретные асимметрии, связанные с тем, как мы двигаемся. Измерение походки может быть выполнено с использованием кинетической (силовой) и кинематической (пространственной/временной) информации. Стандартная оценка походки требует, по крайней мере, одного полного цикла ходьбы, который включает в себя приземление стопы наблюдаемой ногой, приземление контралатеральной стопы другой ногой, за которым следует еще одно приземление стопы наблюдаемой ногой. Конечно, чем больше проанализировано ударов ногой, тем лучше будет приспособиться к постоянному набору естественных ударов ступней из-за присущей им изменчивости.
Походку человека можно определить как серию чередующихся движений нижних конечностей в ритмичном движении, которое приводит к продвижению тела вперед с минимальными затратами энергии. Чтобы определить проблемы с походкой, клиницисты и исследователи часто используют анализ походки для оценки и лечения людей с различными состояниями, патологиями или травмами, влияющими на их способность ходить или бегать.
Каковы фазы походки?
Глядя на цикл походки с точки зрения времени, его можно разбить на две отдельные глобальные фазы: фазу опоры и фазу маха.
- Фаза опоры походки начинается, когда ступня впервые касается земли, и заканчивается, когда та же ступня отрывается от земли. Фаза опоры составляет примерно 60% цикла ходьбы.
- Фаза переноса походки начинается, когда ступня впервые отрывается от земли, и заканчивается, когда та же ступня снова касается земли. Фаза переноса составляет остальные 40% цикла походки.
Существуют также важные этапы поддержки, известные как:
- . Одинарная опорная фаза
- Начальная фаза двойной поддержки
- Клеммная двойная опора фаза
Фаза с одной опорой также известна как фаза качания, когда только одна конечность соприкасается с землей. При нормальной походке эта фаза составляет 60-72% фазы опоры.
При нормальной походке эта фаза составляет 60-72% фазы опоры.
Начальная фаза с двойной опорой — это подфаза между контактом пятки в фазе и контралатеральным отрывом стопы. Эта фаза составляет примерно 14-20% фазы опоры.
Конечная фаза двойной опоры — это подфаза от контралатеральной стопы до отрыва пальцев. Эта фаза составляет примерно 14-20% фазы опоры. Общая фаза двойной поддержки определяется как сумма начальной и конечной фазы двойной поддержки. Это составляет примерно 28-40% фазы опоры.
Как правило, проблемы/патологии походки появляются во время фазы опоры при ходьбе, когда стопа нагружена, что в конечном итоге влияет и на фазу переноса. Чтобы лучше понять, как функционирует стопа, фазу опоры можно дополнительно разбить на более точные подэтапы, чтобы обеспечить более глубокий взгляд. Эти фазы называются:
- Фаза контакта (контакт пяткой или удар пяткой)
- Подножка
- Фаза средней стойки
- Пропульсивная фаза (активная и пассивная)
Фаза контакта представляет собой первый контакт пятки ведущей ноги и заканчивается в момент «отрыва носка» противоположной ноги.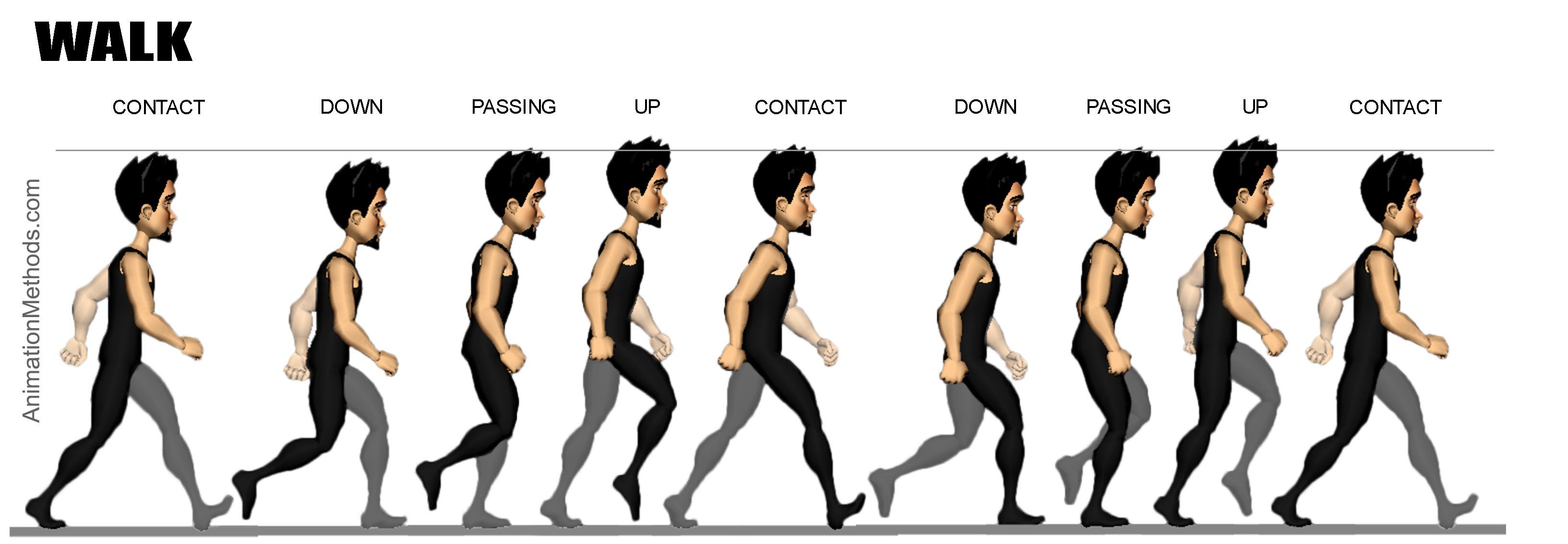 Контактная фаза составляет 14-20% фазы опоры.
Контактная фаза составляет 14-20% фазы опоры.
Фаза приземления стопы или фаза «реакции на нагрузку» выполняет важную функцию, поскольку в этот момент вес тела переносится на ведущую ногу и, таким образом, должен поглощать этот вес, сохраняя импульс движения вперед. Эта фаза определяется первым контактом пятки ведущей ноги с первым контактом головки первой плюсневой кости ведущей ноги. Фаза приземления стопы составляет 16-22% фазы опоры.
Фаза в средней стойке — это точка, в которой опорная конечность переходит от амортизации к более стабильной функции. Эта фаза определяется от точки отрыва носка контралатеральной ноги до первой точки, когда пятка отрывается от земли ведущей ноги. Фаза средней стойки составляет 29-37% фазы опоры.
Заключительная фаза стойки называется пропульсивной фазой . Во время пропульсивной фазы стопа обычно супинирует, чтобы обеспечить более жесткую среднюю часть стопы, поэтому она может действовать больше как рычаг (механизм Winlass), помогая продвигать тело вперед.![]() Пропульсивная фаза походки иногда еще больше разбивается на активную пропульсивную и пассивную пропульсивную фазы. Причина этого разделения состоит в том, чтобы изолировать компонент пропульсивной фазы, когда он все еще находится в одинарной опоре, и пассивный компонент пропульсивной фазы, когда он находится в двойной опоре. Полная пропульсивная фаза — это точка отрыва пятки ведущей ноги от носка ведущей ноги. Эта фаза составляет 45-55% фазы опоры.
Пропульсивная фаза походки иногда еще больше разбивается на активную пропульсивную и пассивную пропульсивную фазы. Причина этого разделения состоит в том, чтобы изолировать компонент пропульсивной фазы, когда он все еще находится в одинарной опоре, и пассивный компонент пропульсивной фазы, когда он находится в двойной опоре. Полная пропульсивная фаза — это точка отрыва пятки ведущей ноги от носка ведущей ноги. Эта фаза составляет 45-55% фазы опоры.
Активная пропульсивная фаза представляет собой точку отрыва пятки от ведущей ноги до точки первого контакта с противоположной ногой. Эта активная пропульсивная фаза составляет 31-35% пропульсивной фазы.
Пассивная пропульсивная фаза представляет собой пяточный контакт противоположной носку ведущей ноги. Пассивная пропульсивная фаза составляет 14-20% пропульсивной фазы.
Измерение и сбор данных о походке с помощью наших систем анализа походки Tekscan предлагает системы анализа походки для измерения походки с помощью технологии , встроенной в обувь , или , платформы .
Пространственные параметры походки
Взгляд на походку с пространственной точки зрения позволяет нам измерить асимметрию походки, связанную с расстоянием между шагами и длиной шагов. Некоторые типичные пространственные параметры походки: длина шага, длина шага, ширина шага и угол стопы.
- Длина шага — длина, измеренная параллельно линии движения тела от заднего контакта (пятки) предыдущего шага до заднего контакта (пятки) текущего противоположного шага.
- Длина шага — это расстояние, измеренное параллельно линии прогрессии, между задними точками пятки двух последовательных следов рассматриваемой стопы
- Ширина шага — это расстояние, измеренное между линией движения левой ноги и линией движения правой ноги.
- Угол стопы — это угол между линией прогрессии и осью стопы. Угол стопы равен нулю, когда ось стопы параллельна линии прогрессии. Угол стопы положителен, если ось стопы направлена сбоку от линии прогрессии.
 Угол стопы отрицательный, если ось стопы направлена медиально к линии прогрессии.
Угол стопы отрицательный, если ось стопы направлена медиально к линии прогрессии.
 Угол стопы отрицательный, если ось стопы направлена медиально к линии прогрессии.
Угол стопы отрицательный, если ось стопы направлена медиально к линии прогрессии.Другие временные переменные могут быть рассчитаны на основе этой информации, времени шага, скорости шага и отношения длины шага к длине ноги. Это можно рассчитать по длине ноги пациента.
Почему важен анализ цикла походки
Есть много причин, по которым анализ цикла походки важен как в клинической, так и в исследовательской среде.
- Предотвращение травм: Выявление асимметрии у бессимптомного пациента, которая может быть не обнаружена до тех пор, пока у пациента не появится травма.
- Подтверждение после лечения: Будьте уверены, что ваше лечение приводит к положительным изменениям в походке вашего пациента с оценками до/после лечения или операции.
- Sports Performance: Понимание того, как двигается спортсмен, может помочь оптимизировать его производительность и составить индивидуальные планы тренировок для дальнейшего улучшения спортивных результатов.
- Оценка влияния различных условий: Исследователи могут оценить влияние различных типов обуви, местности, пола и многих других условий на походку человека. Изучая влияние различных условий, обуви, условий на рабочем месте и бесчисленное множество других исследований, мы можем увидеть улучшения функции походки человека.

Технология анализа походки
Существует множество систем и программного обеспечения для ходьбы, которые можно использовать для сбора пространственно-временной информации о пациентах или спортсменах во время ходьбы.
Анализ движения
Анализ движения — это одна из методологий, которая может точно фиксировать эту информацию; однако может потребоваться время, чтобы настроить пациента с помощью маркеров, необходимых для сбора данных, и невозможно получить непрерывную кинетическую информацию, если несколько силовых пластин не синхронизированы.
Картирование силы и давления
Системы картирования силы и давления оснащены тысячами датчиков, расположенных в виде непрерывной дорожки, чтобы обеспечить сбор данных о нескольких последовательных ударах ногой.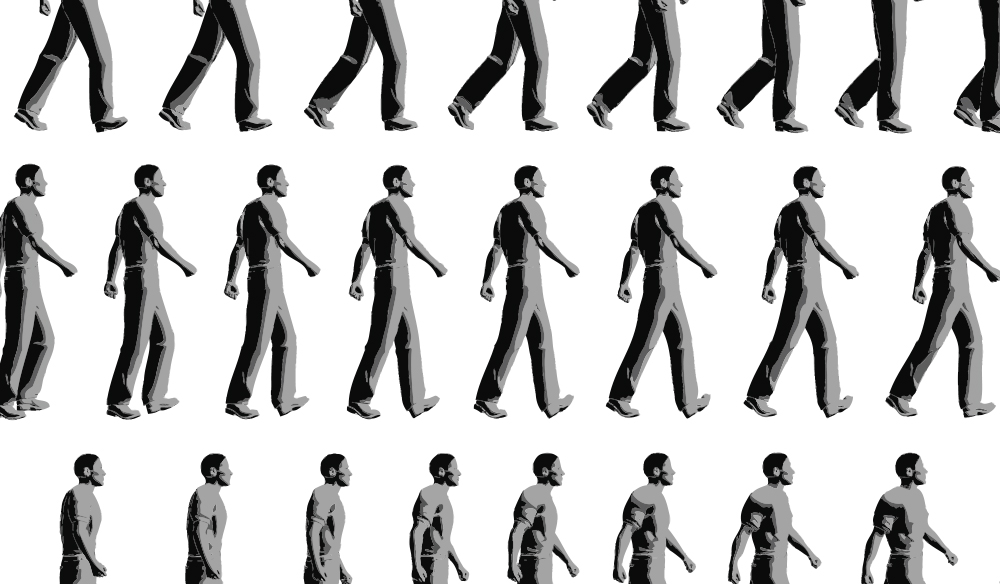 Эти инструменты требуют минимальной настройки, что позволяет быстро и без ограничений оценивать походку пациента или спортсмена, что является ключевым моментом в загруженной клинике походки. Данные о походке из одного простого набора данных могут предоставить пространственную (длина шага, длина шага и т. д.), временную (время шага, время шага, скорость шага и т. д.) и кинетическую (вертикальная сила, распределение давления, центр силы) информацию для полного анализ цикла ходьбы. Данные этих систем можно сравнить с нормативными данными о походке, или асимметрию между стопами можно количественно оценить с пространственной, временной или кинетической точки зрения. Эта информация может дать важные сведения о типе патологии или травмы пациента/спортсмена. Он также может предоставить количественную обратную связь о том, как пациент или спортсмен продвигается в своей реабилитации.
Эти инструменты требуют минимальной настройки, что позволяет быстро и без ограничений оценивать походку пациента или спортсмена, что является ключевым моментом в загруженной клинике походки. Данные о походке из одного простого набора данных могут предоставить пространственную (длина шага, длина шага и т. д.), временную (время шага, время шага, скорость шага и т. д.) и кинетическую (вертикальная сила, распределение давления, центр силы) информацию для полного анализ цикла ходьбы. Данные этих систем можно сравнить с нормативными данными о походке, или асимметрию между стопами можно количественно оценить с пространственной, временной или кинетической точки зрения. Эта информация может дать важные сведения о типе патологии или травмы пациента/спортсмена. Он также может предоставить количественную обратную связь о том, как пациент или спортсмен продвигается в своей реабилитации.
Tekscan предлагает два типа решений для анализа походки: системы анализа походки в обуви и системы на основе платформы.
Чтобы узнать больше о преимуществах анализа походки с помощью объективной технологии, посетите этот веб-семинар: Введение в анализ походки с помощью технологии.
Люди ходят странно. Ученые могут наконец узнать почему Биомеханики разбивают один шаг на несколько фаз: сначала идет приземление, когда пятка касается пола. Затем следует фаза одиночной поддержки, когда вы балансируете на этой ноге. После этого вы перекатываетесь на носки для взлета, и ваша нога совершает мах вперед.
Во всем этом есть тайна. Исследователи давно заметили, что когда мы идем, наша опорная нога дважды подпрыгивает, прежде чем перейти к следующему шагу. То есть колено сгибается и разгибается один раз, когда ступня впервые касается земли, а затем еще раз непосредственно перед взлетом. Этот первый отскок помогает нашей ноге амортизировать удар нашего веса, когда мы ударяемся о землю. Но функция второго отскока, характерного для человеческой походки, никогда не была ясна.
В Физическом обзоре E 9В статье 0084, опубликованной в прошлом месяце, ученые из Мюнхенского университета, возможно, нашли ответ. Смоделировав физические силы, которые вызывают наш двойной прыжок, они пришли к выводу, что это энергосберегающий метод для вида, который долгое время отдавал предпочтение выносливости, а не скорости, что может быть ключом к разгадке того, почему люди развили такую странную походку. Теперь они считают, что их модель может помочь улучшить конструкции протезов и роботов и даже дать представление об эволюционном давлении, с которым сталкивались наши предки.
Смоделировав физические силы, которые вызывают наш двойной прыжок, они пришли к выводу, что это энергосберегающий метод для вида, который долгое время отдавал предпочтение выносливости, а не скорости, что может быть ключом к разгадке того, почему люди развили такую странную походку. Теперь они считают, что их модель может помочь улучшить конструкции протезов и роботов и даже дать представление об эволюционном давлении, с которым сталкивались наши предки.
«Ключевым элементом здесь является опора, — говорит Даниэль Ренжевски, инженер-механик, руководивший исследованием. Откровенно говоря, человеческая стопа — своего рода диковинка в животном мире. У людей есть 9Угол между ступней и ногой составляет 0 градусов, продолжает он, но это делают немногие другие животные. Это означает, что большинство животных ходят на цыпочках или подушечках стоп, в то время как мы ходим с пятки на носок. Человеческие ступни также относительно плоские, а наши ноги довольно тяжелые, из-за чего оставаться в вертикальном положении при движении тела вперед механически сложно.
Наша модель ходьбы с двойным подпрыгиванием отличается от одиночного подпрыгивания, которое мы совершаем во время бега, которое представляет собой движение, которое в основном совершается в воздухе, говорит спортивный исследователь Мюнхенского университета Сюзанна Липферт, соавтор исследования. Во время ходьбы стопа остается на месте до 70 процентов цикла шага, чтобы помочь нам сохранять равновесие на более медленных скоростях. Но у этого есть компромисс: меньше времени, чтобы двигаться вперед. Как ни странно, это означает, что ваше тело должно работать сильнее при ходьбе, чтобы перевернуть ногу на следующий шаг. «На первый взгляд кажется странным стремиться к походке, которая оставляет очень мало времени, чтобы махнуть ногой вперед», — говорит Ренжевски, из-за того, насколько тяжелы наши ноги: большая масса требует большей силы.
Итак, учитывая все эти проблемы, как человечеству удается справляться? В течение многих лет даже наше механическое понимание того, как мы ходим, было ограниченным, потому что попытка смоделировать то, что делают все мышцы, сухожилия и суставы нижней части тела в любой момент времени, является трудной, если не невозможной, задачей.