7 Волевые усилия
Дискуссионным вопросом психологии воли является вопрос о волевых усилиях. Определения волевых усилий в отечественной психологии сводятся к следующим основаниям:
к переживанию процесса борьбы с трудностями при осуществлении целенаправленных действий и поступков [28; 34]. Так, например Селиванов В.И. рассматривал это переживание как осознанное, но в дальнейшем отмечал, что вследствие огромного эмоционального подъема волевые усилия не осознаются достаточно ясно [34];
к механизму только сознательного регулирования поведения, обеспечивающему определение цели, плана действия и его исполнения [36];
к активному проявлению сознания, направленному на мобилизацию психических и физических возможностей человека, необходимых для преодоления препятствий в процессе деятельности [19];
к результату значимости для личности принимаемого решения и выполненного волевого действия [12].

В общем плане будем понимать под волевыми усилиями сознательное преднамеренное напряжение личностью своих физических, интеллектуальных сил для достижения поставленной цели в условиях мотивационного конфликта или внешних препятствий.
Обсуждаются формы существования волевых усилий, к которым относят:
эмоциональное переживание подъема, активности, воодушевления [34];
сосредоточение внимания [34];
ощущение напряжения [19];
мотивационное побуждение к действию [31];
различные техники, способствующие преодолению трудностей: вербальный самоприказ, ориентировочные реакции, идеомоторная подготовка [19; 37].
Характеристики волевых усилий анализировались [19; 35] в
связи с особенностями преодолеваемых
препятствий при осуществлении
целенаправленных действий и поступков:
интенсивность; мобилизация психических
и физических возможностей человека;
своевременность и длительность;
активность.
Основные виды волевых усилий в психологии различают по характеру преодолеваемых препятствий, по сферам их проявления и диагностическим показателям – интеллектуальные, психомоторные и мышечные.
В связи со структурой регуляции и для ее отдельных компонентов выделяют такие виды волевых усилий, как мотивационно-целевые, выбора и исполнения действия [25].
Критерий для измерения волевых усилий в большинстве эмпирических исследованиях устанавливался по способности человека превзойти собственный результат, полученный в условиях заданной и трудной деятельности, в условиях еще большей необходимости, большей (сверх)мотивации.
Басов М.Я. Воля как предмет функциональной психологии. — Петербург, 1922.
Баканов Е.Н.Исследование генезиса волевого действия. Автореф. канд. дис. – М.: МГУ, 1979. – 22с.
Божович Л.И. Проблемы формирования личности.
/Под ред. Д.И. Фельдштейна. М.: Изд-во
«Институт практической психологии»,
Воронеж: НПО «МОДЭК», 1995. – Из
записных книжек Л.И. Божович: соображения
к проблеме развития воли. С. 333-341.Василюк Ф.Е. Психология переживания. Анализ преодоления критических ситуаций. — М.: МГУ, 1984.
Веккер Л.М. Психические процессы. В трех томах. — Л.: ЛГУ, 1981. Т.3. — Гл. 4.
-
Вундт В. Введение в психологию. М.: Космос. 1912.
Выготский Л.С. СС. В шести томах. — М.: Педагогика, 1982. Т.2. — Лекция 6. Проблема воли и ее развитие в детском возрасте.
Выготский Л.С. СС. В шести томах. — М.: Педагогика, 1983. Т.3. — Гл. 12. Овладение собственным поведением.
Гиппенрейтер Ю.Б. О природе человеческой воли. //Психол. журн. — 2005. — Т.26. №3. — С. 15-24.
Джемс У.
Психология /Под ред. Л.А. Петровской.
— М.: Педагогика, 1991. Гл. 26.Добрынин Н.Ф. Об определении и качествах воли. //Проблемы психологии воли. Материалы научной конференции. — Рязань, 1974. — С. 9-11.
Добрынин Н.Ф. Принцип значимости и волевые усилия //Материалы 3-ей научной конференции по проблемам психологии воли. — Рязань, 1970. — С. 10-12.
Иванников В. А. Воля: миф или реальность? //Вестник МГУ. Сер. 14. Психология. — 1993. — №2. — С. 70-73.
Иванников В.А. Произвольные процессы и проблема воли.//Вестник МГУ. Сер. 14. Психология. — 1986. — №2. — С. 18-29.
Иванников В. А. Психологические механизмы волевой регуляции. — М.: МГУ, 1991.
Иванников В.А., Эйдман Е.В. Структура волевых качеств по данным самооценки // Психол. журн. — 1990. — Т. 11. — №3. – С.39-42.
Ильин Е.
П. Психофизиология физического
воспитания: (Факторы, влияющие на
эффективность спортивной деятельности).
Учеб. пособие для студентов пед. ин-тов
по спец. №2114 «Физ. воспитание». –
М.: Просвещение, 1983. — Гл.5.Ильин Е.П. Психология воли. — СПб.: Питер, 2000. — С. 39-43.
Калин В.К. К вопросу о волевом усилии. // Ученые записки Рязанского пединститута. — М.: Просвещение, 1968. -.Т. 59. — С.111-129.
Калин В.К. Актуальные аспекты теории воли.// Эмоционально-волевая регуляция поведения и деятельности. Тезисы 2-го Всесоюзного семинара молодых ученых. Симферополь, 19-24 мая 1986 г. — М., 1986. — С. 120-124.
Леонтьев А.Н. Воля //Вестник МГУ. Сер. 14. Психология. — 1993. — №2. — С. 3-14.
Мей Р. Любовь и воля. — М.: Ваклер, 1997. Ч.2.
Петухов С.А. К проблеме классификации волевых качеств личности // Личность и деятельность: Тезисы докладов к У Всесоюзному съезду общества психологов.
Платонов К.К., Голубев Г.Г. Психология. Учебник для индустриально-пед. техникумов. М.: Высшая школа, 1973. – Гл. 9.
Пуни А.Ц. Волевая регуляция двигательной деятельности в спорте.//Управление процессом спортивной тренировки. Сборник докладов 2 Всероссийской конференции. — Л., 1974.
Пуни А.Ц. Некоторые вопросы теории воли и волевая подготовка в спорте.// Психология и современный спорт. — М.: ФиС, 1973. — С. 144-162.
Пуни А.Ц. О препятствиях различной степени трудности как необходимых факторах проявления и развития воли.//Тезисы докладов на межвузовской научной конференции по проблемам психологии воли и формирования волевых качеств личности. — Рязань, 1964. – С.6-9.
Пуни А.Ц. Психологические основы волевой подготовки в спорте. Учебное пособие. — Л., 1977.
Рибо Т.
Воля в ее нормальном и болезненном
состоянии. Пер. с 8-го доп. фр. издания
под ред. В. Аболенского. — СПб., 1894. –
190с.Рубинштейн С.Л. Основы общей психологии. В двух томах. — М.: Педагогика, 1989. Т.2. Гл. Воля.
Рудик П.А. Психология. М.: ФиС, 1974. Гл. 4.
Селиванов В.И. Волевая регуляция активности личности. // Психол. журн.- 1982. -Т. 3. — №4.-С. 14-25.
Селиванов В.И. Вопросы воли в советской психологии. //Вопросы психологии и педагогики воли. /Под ред. В.И. Селиванова. — Краснодар, 1969. — С. 3-16.
Селиванов В.И. Воспитание воли школьника. 2-е изд. М.: МП СССР, 1954.
Селиванов В.И. Индивидуальные особенности воли и их учет в учебно-воспитательной работе. //Вопросы организации воспитания в ВУЗе. – Рязань: Рязанский гос. пед. ин-т, 1975.
Селиванов В.
И. Психология волевой активности.
Лекции по спецкурсу. — Рязань, 1974.Симонов П.В. О филогенетических предпосылках воли. //Вопросы психологии. — 1971. — №4. — С. 84-88.
Симонов П.В. Эмоциональный мозг. — М.: Наука, 1981. — С. 160-168.
Смирнова Е.О. Развитие воли и произвольности в раннем онтогенезе. //Вопросы психологии. — 1990. — № 3. — С. 49-54.
Франкл В. Человек в поисках смысла. — М.: Прогресс, 1990.
Чхартишвили Ш.Н. Проблема воли в психологии. //Вопросы психологии. — 1967. — №.4. — С. 72-81.
Шмаков А.В. Воля как активно-личностная форма отражения действительности: Автореф. канд. дис., М., 1972. 19с.
 /Под ред. Д.И. Фельдштейна. М.: Изд-во
«Институт практической психологии»,
Воронеж: НПО «МОДЭК», 1995. – Из
записных книжек Л.И. Божович: соображения
к проблеме развития воли. С. 333-341.
/Под ред. Д.И. Фельдштейна. М.: Изд-во
«Институт практической психологии»,
Воронеж: НПО «МОДЭК», 1995. – Из
записных книжек Л.И. Божович: соображения
к проблеме развития воли. С. 333-341. Психология /Под ред. Л.А. Петровской.
— М.: Педагогика, 1991. Гл. 26.
Психология /Под ред. Л.А. Петровской.
— М.: Педагогика, 1991. Гл. 26. П. Психофизиология физического
воспитания: (Факторы, влияющие на
эффективность спортивной деятельности).
Учеб. пособие для студентов пед. ин-тов
по спец. №2114 «Физ. воспитание». –
М.: Просвещение, 1983. — Гл.5.
П. Психофизиология физического
воспитания: (Факторы, влияющие на
эффективность спортивной деятельности).
Учеб. пособие для студентов пед. ин-тов
по спец. №2114 «Физ. воспитание». –
М.: Просвещение, 1983. — Гл.5.
 Воля в ее нормальном и болезненном
состоянии. Пер. с 8-го доп. фр. издания
под ред. В. Аболенского. — СПб., 1894. –
190с.
Воля в ее нормальном и болезненном
состоянии. Пер. с 8-го доп. фр. издания
под ред. В. Аболенского. — СПб., 1894. –
190с. И. Психология волевой активности.
Лекции по спецкурсу. — Рязань, 1974.
И. Психология волевой активности.
Лекции по спецкурсу. — Рязань, 1974.34
Виды воли, проявление воли — Психологос
В разных ситуациях воля получает разные названия. Ее имена — мужество, решительность, самодисциплина, вера в себя. .. Самые распространенные проявления воли, это:
.. Самые распространенные проявления воли, это:
- дисциплина и самодисциплина — проявление воли перед лицом усталости, эмоций и других соблазнов.
- мужество — проявление воли в трудных или экстремальных обстоятельствах. Ответственное и разумное, в меру смелое и в меру спокойное, поведение в трудных или экстремальных обстоятельствах.
- терпение — проявление воли перед лицом длящегося напряжения, отказ от импульсивных действий, сохранение разумного бездействия или повторение раз за разом действий, не приводящих к немедленному результату.
- решительность — проявление воли перед лицом ответственных решений. Возможность принимать решения в неопределенной ситуации. Способность и умение самостоятельно принимать ответственные решения и делать то, что решил, несмотря на помехи. См.→
- вера в себя — убежденность человека в том, что у него все получится; уверенность в себе перед лицом вызова, перед трудной задачей.
Мудрость в проявлениях воли
Одно из важнейших проявлений мудрости — держать правильный баланс между мужеством и терпением. См.→
См.→
Волевой акт и волевые усилия
Воля проявляется в волевых актах: действиях, сопровождаемых волевыми усилиями. решениях как делать правильно.
Бежать от того, что страшно – это не волевое решение. Бежать туда, где страшно, чтобы помочь людям – это волевое решение.
При этом мотивация убежать (спасти себя) должна быть по силе равной, или сильнее мотивации остаться на месте и помогать – тогда проявляется волевой акт. Если человек остается спасать людей, потому что в противном случае его застрелят — речь о волевом акте не идет.
Волевой акт — это правильные действия тогда, когда неправильно действовать проще или привычнее.
Другими словами, волевой акт (волевое усилие) – это противостояние инстинктивного поведения, диктуемого генами или привычками и осознанного поведения, выбираемого самим человеком.
Волевое решение появляется там, где организм неосознанно готовит одну физиологическую реакцию, а разум заставляет запустить другую. Момент перестраивания организма с одной, инстинктивной или привычной реакции на другую и называется волевым усилием.
Момент перестраивания организма с одной, инстинктивной или привычной реакции на другую и называется волевым усилием.
Представьте, что вам нужно прыгать с парашютом с вышки: тело говорит – уйди от края, а разум говорит: шагай через край! Так как тело в основном соображает быстрее разума, оно заранее успевает подготовиться к тому, что нужно уходить. В ключевой момент разум командует – вперед! а тело уже приготовилось убегать назад: соответствующие мышцы пришли в тонус, а теперь нужно подключать мыщцы совершенно другие. Тело перестраиваться не хочет, но обычно, если человек настаивает — подчиняется.
Волевое усилие всегда связано с разумом, управляется человеком через разум, и направлено против привычки или инстинктивного поведения. Соответственно, процесс естественной перестройки организма (например от сна к бодрствованию) — не является волевым услилем, потому что происходит неосознанно и по привычке.
А.Н. Леонтьев пишет о так называемом феномен «обратного толчка». Стоящий на вышке человек перед прыжком с парашютом, невольно изменяет свой центр тяжести, смещая его назад, «убегая» от края вышки и только потом совершает прыжок или отказывается прыгнуть.
Стоящий на вышке человек перед прыжком с парашютом, невольно изменяет свой центр тяжести, смещая его назад, «убегая» от края вышки и только потом совершает прыжок или отказывается прыгнуть.
Активное волевое усилие нужно только вначале, через какой-то промежуток повторений (обычно 20-40 повторений) организм привыкает к другой активности: к тому, что нужно делать новое действие, и готовит тело уже к новому.
Если воля развитая, то процесс перестройки происходит быстрее и легче, если воля слабая – труднее. Чем чаще совершается волевое усилие, тем проще организму перестроить себя на новый, непривычный лад. см. Развитие воли
Воля и решительность
Решительность — проявление воли в принятии и продвижении трудных решений.
Заметим, что решительный человек не всегда последовательный, не всегда методичный, не обязательно все свои решения доводит до конца. Решительно начал, решительно продвигал — а потом просто остыл и решительно переключился на другой проект.
Факторы, влияющие на простоту осуществления волевого усилия
В зависимости от ситуации совершить волевое усилие может быть просто, а может трудно, это зависит от ряда факторов.
1. Привычка или инстинкт?
Привычка – это то, к чему мы привыкли, но чего генами нам не заложено. Инстинкт – это то, что в нас заложено генами. Соответственно, волевое усилие, направленное в «обратную сторону» привычки совершить проще, чем волевое усилие, направленное против инстинкта.
Утром встать пораньше или в экстремальной ситуации спасать жизнь не только себе, но и людям вокруг – усилия нужны разные.
2. Окружающая среда
Внутренний стимул делать как было обычно сильнее осознанного стимула делать по-новому.
Это значит, что чтобы добиться желаемого нужно найти или создать себе стимулы внешние:
проговорить вслух обязательство, придумать себе контролера, создать себе коллаж мечты и так далее.
А.Н. Леонтьев в своей статье «Воля» упоминал случай, когда женщина, побоявшаяся прыгнуть с вышки с парашютом на следующий день вернулась и попросила прыгнуть. Когда ее спросили, почему она так сделала, она сказала, что вчера ее спросили, прыгнула ли она с парашютом и она сказала да, а на самом деле не прыгала. И теперь ей хочется прыгнуть, чтобы не казаться самой себе обманщицей.
Когда ее спросили, почему она так сделала, она сказала, что вчера ее спросили, прыгнула ли она с парашютом и она сказала да, а на самом деле не прыгала. И теперь ей хочется прыгнуть, чтобы не казаться самой себе обманщицей.
3. Позитив-негатив
Сконцентрированность на хорошей, «не страшной» стороне трудного решения делает осуществление волевого усилия более простым. (опять же ссылаясь на Леонтьева, если людям предлагали смотреть на парашют, а не вниз, где было высоко и страшно – отказов от прыжков становилось меньше).
Хотите научиться делать зарядку – концентрируйтесь на хорошем, на том, как здорово будет бежать навстречу прохладному ветру, подмигивая встающему солнцу, о том, как тихо утром в парке, как прозрачен и свеж хрустальный утренний воздух – поднять себя с постели будет проще.
4. Скорость принятия решения
Чем больше осуществляется волевое усилие, тем оно труднее: чем дольше организм готовит «отступление», тем труднее ему будет перестроиться на новый лад под влиянием разума и воли.
Соответственно, чем быстрее вы утром встаете и чем меньше времени уходит на размышление вставать-не вставать, тем проще будет встать.
Воля в разных областях человеческой жизни
- Воля спортсмена — статья Р.М. Загайнова.
|
Навигация: Главная Случайная страница Обратная связь ТОП Интересно знать Избранные Топ: Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда… Динамика и детерминанты показателей газоанализа юных спортсменов в восстановительном периоде после лабораторных нагрузок до отказа… Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует. Интересное: Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все… Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления… Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей… Дисциплины: Автоматизация Антропология Археология Архитектура Аудит Биология Бухгалтерия Военная наука Генетика География Геология Демография Журналистика Зоология Иностранные языки Информатика Искусство История Кинематография Компьютеризация Кораблестроение Кулинария Культура Лексикология Лингвистика Литература Логика Маркетинг Математика Машиностроение Медицина Менеджмент Металлургия Метрология Механика Музыкология Науковедение Образование Охрана Труда Педагогика Политология Правоотношение Предпринимательство Приборостроение Программирование Производство Промышленность Психология Радиосвязь Религия Риторика Социология Спорт Стандартизация Статистика Строительство Теология Технологии Торговля Транспорт Фармакология Физика Физиология Философия Финансы Химия Хозяйство Черчение Экология Экономика Электроника Энергетика Юриспруденция |
⇐ ПредыдущаяСтр 33 из 82Следующая ⇒ Воля проявляет себя в двух взаимосвязанных функциях – стимулирующей и тормозной. Стимулирующая функция обеспечивается активностью человека. Активность порождает действие в силу специфики внутренних состояний человека, которые возникают в момент самого действия (человек, который испытывает потребность в поддержке во время своего выступления, призывает высказаться единомышленников; пребывая в глубокой печали, человек жалуется на всех окружающих и т.д.). Активности присущи мимовольность и произвольность хода действий и поведения. Если активность выступает свойством воли, то она характеризуется произвольностью, т.е. предопределенность действий и поведения относительно поставленной цели. Такая активность не подчиняется актуальным побуждениям, она характеризуется способностью подниматься над уровнем требований ситуации (над ситуативностью). Можно указать еще на одну особенность стимулирующей функции. Если у человека отсутствует актуальная потребность выполнять действие, но при этом необходимость выполнения ее он осознает, воля создает вспомогательное побуждение, изменяя смысл действия (делает его более значимым, вызывая переживания, связанные с предполагаемыми последствиями действия). Принуждение человека к действиям создают определенную упорядоченную систему – иерархию мотивов – от естественных потребностей до высших побуждений, связанных с переживаниями моральных, эстетических и интеллектуальных чувств. Если исходить из понимания свободы как моральной саморегуляции, тогда основной ее характеристикой станет подчинение личных мотивов социально значимым, а акцент переносится на проблему направленности личности. Основным проявлением воли становится поступок. Тормозная функция проявляется в сдерживании нежелательных проявлений активности. Эта функция чаще всего выступает в единстве со стимулирующей. Человек способен тормозить возникновение нежелательных мотивов, выполнение действий, поведения, которые противоречат представлениям о образце, эталоне и осуществление которых может поставить под сомнение или повредить авторитету личности. Волевое регулирование поведения было бы невозможно без тормозной функции. Примерами тормозной функции могут быть отдельные проявления человеческой воспитанности. В ряде случаев само принятие решения связано с большим внутренним напряжением, почти приобретающим стрессовый характер, с необходимостью победить в себе влияние других сильных потребностей. Такая необходимость преодоления препятствий в себе самом (борьба с некоторыми своими желаниями, с укоренившимися дурными привычками, с привычным, но не оправдываемым моральными принципами подходом к бытовым явлениям) связана с наличием волевого усилия, переживание которого является характерным качеством волевого акта. Что же заставляет человека подавлять в себе некоторые весьма интенсивные стремления? Одного лишь понимания того, что данное решение отвечает моральным принципам или же является общественно полезным, недостаточно, чтобы подвигнуть человека на трудное дело. Но если понимание подкрепляется острым переживанием необходимости поступить, например, в соответствии с чувством долга, тогда это порождает усилие, позволяющее подавить многие другие стремления. Чувство долга является выражением того, что требования морали интериоризировались, превратившись в достояние личности, стали для нее внутренним побуждением к поведению в любой ситуации, где возникает коллизия между эгоистическими устремлениями и общественными интересами. Это чувство долга и определяет, куда опустится чаша весов при борьбе мотивов. Когда мы говорим о волевом акте, то следует помнить, что переживание усилия возникает не только при принятии решения. Очень часто наибольшего усилия требует исполнение принятого решения. Это происходит потому, что выполнение решения нередко наталкивается на ряд препятствий субъективного и объективного порядка. Наряду с преодолением препятствий в самом себе мы встречаемся с волевой деятельностью, которая связана с преодолением серьезных внешних препятствий. Таким образом, характерное для волевой деятельности усилие возникает часто не только потому, что появляется конфликт противоборствующих мотивов (иногда такого конфликта нет), но потому, что приходится преодолевать препятствия объективного характера для окончательного осуществления принятого решения. Анализ структуры волевого акта позволяет увидеть и ряд особенностей волевой деятельности в целом. Нельзя забывать, что волевая деятельность выполняет в общем поведении человека целый ряд существенных функций, которые поднимают организацию этого поведения на более высокий уровень, делают человека более приспособленным к решению важных для его жизни и деятельности задач. Волевая деятельность регулирует поведение человека в соответствии с теми значимыми целями, которые он ставит перед собой как сознательная личность. Человек тормозит возникновение таких побуждений и осуществление таких действий, которые не соответствуют его идеалам, убеждениям, оценкам и самооценке. Таким образом, воля обнаруживает одну из своих важнейший функций – функцию торможения, контроля, регулирования поведения. Регулирование поведения заключается не только в торможении и сдерживании нежелательных для личности побуждений и действий, оно выражается и в том, что человек направляет свою активность по определенному руслу, внося необходимую энергию в свои действия. Волевая сфера постоянно стимулирует активность человека. Осуществление ряда успешных действий вызывает у него состояние уверенности. Каждое успешно осуществленное волевое действие не только проторяет дорогу и облегчает выполнение нового волевого действия (человек тренируется в выполнении действий, требующих от него усилий), но и стимулирует человека на дальнейшее развитие его волевых качеств. ⇐ Предыдущая28293031323334353637Следующая ⇒ Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ — конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой… Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим… Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций… Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого… |
 ..
..


 Да, взять на себя ответственность в сложном деле, зная, что соучастник может «сломаться», чтобы дать ему шанс подняться, выдержать осуждение окружающих, если дело, которое осуждается, принесет пользу в будущем. Особенно часто тормозная функция необходима в повседневной жизни. Это может быть решение сдержаться в принципиальном для человека споре; не дать выхода агрессии; довести неинтересное, но необходимое дело до конца; воздержаться от развлечения ради занятий и т.п.
Да, взять на себя ответственность в сложном деле, зная, что соучастник может «сломаться», чтобы дать ему шанс подняться, выдержать осуждение окружающих, если дело, которое осуждается, принесет пользу в будущем. Особенно часто тормозная функция необходима в повседневной жизни. Это может быть решение сдержаться в принципиальном для человека споре; не дать выхода агрессии; довести неинтересное, но необходимое дело до конца; воздержаться от развлечения ради занятий и т.п.
 Так, исполнению решения, например, начать подготовку к экзаменам, могут в большой степени мешать укоренившиеся привычки, стойкие склонности проводить свой день вне всякого режима. Тогда изменение установившегося уклада жизни наталкивается на серьезные препятствия в самом человеке. Нужны усилия, чтобы преодолеть настойчивую потребность вечером отправляться гулять, утром вставать поздно и т.д. Все это требует известного напряжения, внимания к тому, что ранее почти не требовало заботы. Это связано с невольно возникающим внутренним сопротивлением, с появлением отрицательных эмоций, с фрустрациями. Правда, победа в борьбе с самим собой вызывает чувства положительного характера: переживание власти над собой, сознание собственной силы, сознание, что можешь добиваться поставленных перед собой существенных целей. Тем не менее напряжение может быть значительным и переживание усилия большим.
Так, исполнению решения, например, начать подготовку к экзаменам, могут в большой степени мешать укоренившиеся привычки, стойкие склонности проводить свой день вне всякого режима. Тогда изменение установившегося уклада жизни наталкивается на серьезные препятствия в самом человеке. Нужны усилия, чтобы преодолеть настойчивую потребность вечером отправляться гулять, утром вставать поздно и т.д. Все это требует известного напряжения, внимания к тому, что ранее почти не требовало заботы. Это связано с невольно возникающим внутренним сопротивлением, с появлением отрицательных эмоций, с фрустрациями. Правда, победа в борьбе с самим собой вызывает чувства положительного характера: переживание власти над собой, сознание собственной силы, сознание, что можешь добиваться поставленных перед собой существенных целей. Тем не менее напряжение может быть значительным и переживание усилия большим. Цель ясна, сомнений в необходимости ее достижения не возникает, решение принято без большой борьбы мотивов, однако само исполнение решения наталкивается на трудности. Их требуется преодолеть, проявляя при этом терпение, настойчивость, учитывая неожиданно появившиеся новые обстоятельства. Надо осуществлять усилия не один раз, не два, а длительное время, постоянно. Необходимо поддерживать состояние готовности преодолевать препятствия. Все это, конечно, заставляет человека продолжительное время пребывать в состоянии напряжения, которое переносить бывает нелегко.
Цель ясна, сомнений в необходимости ее достижения не возникает, решение принято без большой борьбы мотивов, однако само исполнение решения наталкивается на трудности. Их требуется преодолеть, проявляя при этом терпение, настойчивость, учитывая неожиданно появившиеся новые обстоятельства. Надо осуществлять усилия не один раз, не два, а длительное время, постоянно. Необходимо поддерживать состояние готовности преодолевать препятствия. Все это, конечно, заставляет человека продолжительное время пребывать в состоянии напряжения, которое переносить бывает нелегко.

E. Do Ильин ПСИХОЛОГИЯ ВОЛИ 2-е издание tgrmTEP* Москва ■ Санкт-Петербург ■ Нижний Новгород ■ Воронеж Ростов-на-Дону ■ Екатеринбург ■ Самара ■ Новосибирск Киев ■ Харьков ■ Минск 2009 ББК 88.352.2я7 УДК 159.947(075) И46 Ильин Е. П. И46 Психология воли. 2-е изд. — СПб.: Питер, 2009. — 368 с.: ил. — (Серия «Мастера психологии»). ISBN 978-5-388-00269-3 Второе, переработанное и дополненное, издание учебного пособия (предыдущее вышло в 2000 г.) посвящено одному из важнейших разделов общей психологии — теории и методологии изучения волевых процессов. В книге с авторской позиции проанализированы традиционные и новейшие научно-философские, психологические и физиологические представления о явлениях волевой сферы человека (в частности, о «силе воли»), прослежены закономерности ее развития в онтогенезе, а также ее проявления в различных видах поведения и деятельности, рассмотрены вопросы патологии воли. В систематизированном виде в пособии представлены малоизвестные психодиагностические методики изучения воли, которые могут быть с успехом использованы в практической деятельности специалистов системы образования, спортивной и производственно-организационной сферы. Издание адресовано психологам, психофизиологам, педагогам, а также студентам вузовских факультетов психологического и педагогического профилей. ББК 88.352.2я7 УДК 159.947(075) Все права защищены. Никакая часть данной книги не может быть воспроизведена в какой бы то ни было форме без письменного разрешения владельцев авторских прав. © ООО «Питер Пресс», 2009 Оглавление Предисловие ко второму изданию 9 Предисловие к первому изданию 10 Введение 12 Глава 1 Теории воли
Глава 2 Воля как произвольное управление поведением и деятельностью человека
Глава 3 Психофизиологические механизмы произвольного управления поведением и деятельностью
6 Оглавление Глава 4 Самоинициация произвольных действий 4. произвольных действий 90 4.2. Представления о сознательной инициации волевых действий 93 Глава 5 Сознательный самоконтроль как форма произвольного управления
самоконтроля действий 104
Глава 6 Волевая регуляция и волевое усилие (самомобилизация)
Глава 7 Волевые качества личности
Глава 8 Характеристика отдельных волевых качеств
Оглавление 7 Глава 9 Возрастные и половые особенности произвольной активности
Глава 10 Безвольное поведение
Глава 11 Патология воли 11.1. Нарушения произвольного управления психическими процессами 229
детей и детей с задержками психического развития 237 Глава 12 Развитие силы воли
Глава 13 Методы изучения волевых качеств
Вместо заключения 269 Научный словарь терминов 274 Бытовой словарь терминов, характеризующих волевую сферу личности 276 Фразеологический тематический словарь 287 Список литературы 292 8 Оглавление Приложение Методики изучения волевых качеств
методики изучения смелости 330
10.  Самооценка организованности 363 Самооценка организованности 363Предисловие ко второму изданию За время, прошедшее после первого издания этой книги (2000 г.), существенных сдвигов в исследовании проблемы психологии воли не произошло. По-прежнему некоторые физиологи с нескрываемой иронией спрашивают: «А что такое воля?» По-прежнему В. А. Иванников пишет, что «понятие воли не означает какую-то реальность, а является теоретическим конструктом, введенным в науку для объяснения этой реальности» [2006, с. 186]. По-прежнему утверждается, что «неправомерно переходить к обобщениям в плане понимания воли вообще» (Ю. Б. Гиппен-рейтер [2005, с. 17]) и что волевые функции являются частным случаем произвольных функций. Однако при этом не объясняется, что же такое произвольные функции и чем они отличаются от волевых [там же, с. 16]. По-прежнему количество публикаций о воле можно пересчитать по пальцам одной руки, а само понятие «воля» является редким гостем в фундаментальных трудах не только российских, но и западных психологов. Поэтому в двух моих книгах, «Психология воли» и «Мотивация и мотивы» (как частично и в третьей — «Эмоции и чувства»), рассматривается одна и та же проблема — психология произвольного (волевого) управления поведением и деятельностью человека. Изложение этой проблемы в одной книге нереально из-за чрезмерно большого ее масштаба. Если же пойти по пути сокращения материала, то потеряется много интересной и важной информации, относящейся к волевой, мотивационной и эмоциональной сферам человека, изучение каждой из которых может представлять самостоятельный интерес. Во второе издание данной книги включены некоторые новые теоретические и экспериментальные данные о воле, а параграф «Безвольное поведение» первого издания расширен за счет обсуждения вопроса о лени и выделен в самостоятельную главу. В приложении приводятся методики выявления лености. Предисловие к первому изданию Когда после сражения у Бородино в 1812 г. прославленный кавалерист наполеоновской армии маршал Мюрат укорял своих генералов в недостаточной энергичности кавалерийских атак, один из генералов ответил: «Во всем виноваты лошади — они недостаточно патриотичны. Наши солдаты воюют блестяще, если у них нет даже хлеба, но лошади без сена не трогаются с места» [Роковые решения вермахта, 1999, с. 126–127]. В этом диалоге отразилось главное отличие поведения человека от поведения животных — у человека имеются мотивация и «сила воли». Проблема воли, произвольной и волевой регуляции поведения и деятельности человека, давно занимает умы ученых, вызывая острые споры и дискуссии. Несмотря на то что за последнюю четверть века защищено несколько докторских диссертаций по этой проблеме, она все еще далека от разрешения. До сих пор взгляды психологов резко расходятся даже по самым узловым вопросам, связанным с данной темой. Одни отрицают наличие воли как самостоятельного психологического явления, ставят под сомнение ценность самого понятия «воля» (Г. Инглиш, А. Инглиш [H. English, A. English, 1958]), другие, отстаивая самостоятельность воли, видят только одну ее сторону — способность преодолевать затруднения и препятствия (А. Ц. Пуни [1973; 1977]). И нередко в научных работах произвольная регуляция оказывается оторванной от воли. Физиологами же проблема воли и произвольного управления попросту игнорируется. Все это вызывает значительные трудности при изложении проблемы воли как в процессе преподавания психологии, так и при поиске адекватных методов диагностики степени развития «силы воли». Одной из задач данной монографии является критическое рассмотрение проблемы воли как произвольного, т. е. сознательного и преднамеренного (мотивированного) управления со стороны человека своим поведением, деятельностью, эмоциями. Вопрос о сущности воли с самого начала оказался тесно связанным с проблемой мотивации, с объяснением причин и механизмов активности человека. Изучая Предисловие к первому изданию 11 волю, ученые неизбежно затрагивали вопросы мотивации, а изучая мотивацию — непременно касались и волевой регуляции. И это не случайно, так как оба этих направления в психологии обсуждают одну и ту же проблему — механизмы сознательного целесообразного поведения. Особенностью моего подхода к изложению вопроса о волевой сфере является то, что я рассматриваю не волю как мотивацию (точнее, волю — не только как мотивацию), но, наоборот, мотивацию — как волевую (произвольную) интеллектуальную активность человека, как существенную часть произвольного управления. Однако пусть читателя не удивляет, что данная книга не касается вопросов мотивации. Этой обширной и относительно самостоятельной проблеме посвящена другая моя книга (Ильин Е. П. Мотивация и мотивы. СПб., 2000). В то же время по замыслу обе книги составляют единое целое, и в книге «Мотивация и мотивы» лишь подробно рассматривается одна из функций произвольного управления (воли). Несмотря на то что мотивация составляет с волей единое целое — так как без мотивации нет воли, — функции воли не сводятся только к побуждению активности человека (самодетерминации). Она проявляет себя и в инициации (запуске) действий, и в сознательном контроле за ними, и в преодолении возникающих по ходу деятельности затруднений. В связи с этим в книге рассматриваются вопросы самоинициации действий, самоконтроля и самомобилизации. Здесь подробно анализируются соотношения между произвольным управлением и волевой регуляцией; вскрывается, что стоит за понятием «сила воли»; по-новому раскрывается сущность и структура волевых качеств; дается описание способов развития волевой сферы человека и ее нарушение при различных патологиях. При написании данной книги я опирался не только на литературные источники, малодоступные для широкого круга читателей, но и на обширные экспериментальные данные, полученные моими учениками. Введение Поведение человека обусловливается различными физиологическими и психологическими механизмами. Это, с одной стороны, безусловно-рефлекторные и условно-рефлекторные механизмы, определяющие непроизвольную активность человека, и, с другой стороны, произвольное управление, связанное не только с физиологическими, но и с психологическими механизмами (рис. 1). Детерминация поведения Непреднамеренное реагирование на раздражители -непроизвольное поведение Безусловно-рефлекторная Условно-рефлекторная Произвольная (преднамеренное, волевое реагирование на внешние и внутренние стимулы) Рис. Словесные обозначения причин проявления человеком активности в соответствии с вышеприведенной схемой можно разделить на три группы. В первую входят слова, означающие активность, не управляемую личностью, во вторую — слова, означающие произвольную активность, вызванную потребностями и желаниями человека, и в третью — слова, означающие вынужденную активность человека, которую он проявляет против своего желания или при отсутствии такового (табл. 1). Таблица 1. Классификация слов-понятий, характеризующих физиологические и психологические механизмы активности человека
Введение 13 Начало рефлекторному подходу в изучении механизмов поведения положил французский ученый Р. Возможность… превращения сознательных произвольных движений в автоматические дала повод некоторым психологам утверждать, что и все вообще развитие психической жизни шло именно этим путем. В противоположность этому другая школа утверждает, что, напротив, волевое усилие представляет собой нечто вторичное, производное и что сознательные волевые акты возникли уже в самом конце эволюции, как ее венец и завершение. Согласно этой теории, развитие волевых действий шло таким образом: вначале, на первых ступенях животной жизни, существовали лишь самопроизвольные движения и простые, бессознательные рефлексы, представлявшие собой реакцию организованной материи на внешние раздражения. Благодаря многократному повторению одних и тех же двигательных реакций возникли явления памяти или смутно сознаваемые представления о тех движениях, которые раньше совершались. Лазурский А. Ф. Волевые процессы. Избранные труды по общей психологии. Психология общая и экспериментальная. СПб., 2001. С. 233–234 В целом в поведении и деятельности человека Р. Декарт выделил три уровня: безусловно-рефлекторные акты, страсти души и, наконец, мышление и волю, с которыми связано осуществление произвольных актов. Животное управляется своими органами, человек управляет своими органами и господствует над ними. И. В. Гёте 14 Введение Эволюционное учение Ч. Дарвина дало сильный толчок к стремлению ученых свести к минимуму различия между человеком и животными. Детерминизм И. М. Сеченова состоит в том, что вся внешняя активность человека, включая и высшую произвольность, связанную с мотивами долга, любви к Родине и т. п., рассматривалась им как рефлексы, которые начинаются с чувственного возбуждения, а не по велению абстрактной воли. А значит, причинность поведения человека материальна, объективна, поскольку вызывающие чувственное возбуждение сигналы тоже материальны, объективны. Особое место И. М. Сеченов отвел волевой (произвольной) активности человека, выделяя в ней не только физиологические механизмы, но и психологические. В связи с этим он писал: «Воля властна пускать в ход в каждом данном случае не только ту форму движения, которая ему наиболее соответствует, но любую из всех, которые вообще известны человеку. Мне хочется плакать, а я могу петь веселые песенки, танцевать; меня тянет вправо, а я иду влево; чувство самосохранения говорит мне “стой, там тебя ожидает смерть”, а я иду дальше. Хотя произвольное поведение человека у И. М. Сеченова и рефлекторно, но понимание рефлекса имеет существенные отличия от традиционного для того времени. Под «мозговой машиной» И. М. Сеченов понимал не простое передаточное устройство внешнего раздражителя на двигательный аппарат, а механизм, снабженный несколькими центрально-нервными придатками, от деятельности которых зависит конечный эффект воздействия внешнего импульса, т. е. поведение человека: тормозные центры, центры эмоций, память о прежних воздействиях. К сожалению, при дальнейшем развитии рефлекторной теории многое из взглядов И. Воля: 1) способность осуществлять свои желания, поставленные перед собой цели; 2) сознательное стремление к осуществлению чего-нибудь; 3) пожелание, требование; 4) властность, возможность распоряжаться; 5) свобода в проявлении чего-нибудь; 6) свободное состояние (не взаперти, не в тюрьме и т. п.). Ожегов С. И. Словарь русского языка. М., 1985. С. 82–83 Введение 15 Сложность изучения проблемы воли состоит в том, что как в обыденном, так и в научном сознании воля понимается по-разному. В обыденном сознании она предстает то как свобода («вольный казак», «вольному воля»), то как выражение желания человека (вспомним «Сказку о золотом петушке» А. С аффектами тесно связан следующий класс важных сложных длительных процессов — волевые процессы. Часто еще и в наше время принимают волю за особый, специфический психический элемент или же сущность ее усматривается в представлении действий с известным намерением. Более точное исследование волевого процесса по его субъективным и объективным признакам показывает, однако, что он самым тесным образом связан с аффектами и поэтому может наряду с ними считаться течением чувствований. Нет ни одного акта воли, в который не входили бы более или менее интенсивные чувствования, соединяющиеся в аффект. Характерное отличие волевого процесса от аффекта заключается, в сущности, лишь в конечной стадии непосредственно предшествующего волевому действию и сопровождающего его процесса. Если эта конечная стадия отпадает, то остается чистый аффект. Так, например, мы говорим об аффекте гнева, если человек выказывает свое гневное возбуждение только в выразительных движениях; напротив, мы говорим о действии под влиянием аффекта, если человек в гневе, например, свалит своего противника ударом на пол. Во многих случаях аффекты и их содержания чувствований, образующие конституирующие составные части волевого процесса, бывают слабые, но совсем они никогда не отсутствуют. Произвольное действие без аффекта, на основании чисто интеллектуального обсуждения, как оно допускалось многими философами, вообще не возможно. Но волевые процессы, конечно, отличаются при этом от обыкновенных аффектов некоторыми признаками, придающими воле ее своеобразный характер. Вундт В. 2002. С. 44–45 Каталог: system -> files -> imce -> books -> psychology Скачать 2,91 Mb. Поделитесь с Вашими друзьями: | |||||||||||||||||||||||||||||||
 \
\
 1. Представления о непроизвольной инициации
1. Представления о непроизвольной инициации . . . 157
. . . 157  Правда, есть и признаки возрождения интереса к этой проблеме. Так, в переиздании книги Х. Хекхаузена «Мотивация и деятельность» (2003) появилась глава «Волевые процессы: реализация интенций». Однако это оказалось нужным автору не для того, чтобы включить мотивацию в структуру волевого (произвольного) поведения, а для того, чтобы отделить мотивацию от волевых процессов. Между тем Б. Раш писал, что воля без мотивов так же невозможна, как зрение без света или слух без звука [цит. по: Ярошевский, 1986, с. 156].
Правда, есть и признаки возрождения интереса к этой проблеме. Так, в переиздании книги Х. Хекхаузена «Мотивация и деятельность» (2003) появилась глава «Волевые процессы: реализация интенций». Однако это оказалось нужным автору не для того, чтобы включить мотивацию в структуру волевого (произвольного) поведения, а для того, чтобы отделить мотивацию от волевых процессов. Между тем Б. Раш писал, что воля без мотивов так же невозможна, как зрение без света или слух без звука [цит. по: Ярошевский, 1986, с. 156].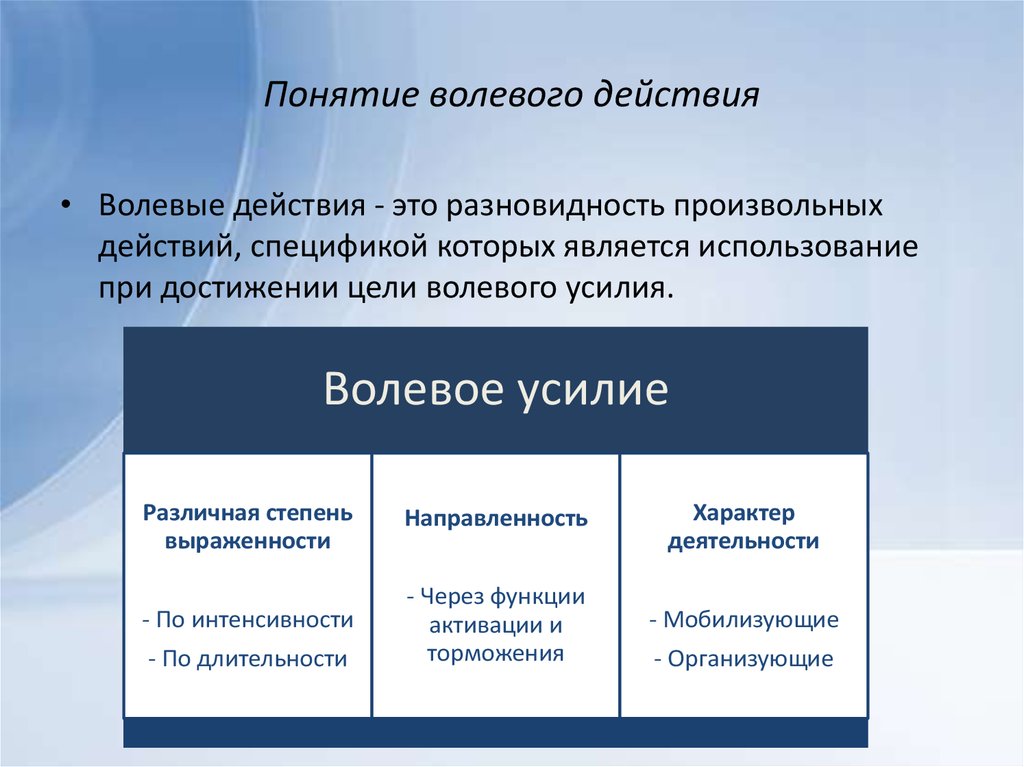
 Еще в Древней Греции обозначились две точки зрения на понимание воли: аффективная и интеллектуалистическая. Платон понимал волю как некую способность души, определяющую и побуждающую активность человека. Аристотель связывал волю с разумом. Этот дуализм в той или иной форме сохранился и до сего времени.
Еще в Древней Греции обозначились две точки зрения на понимание воли: аффективная и интеллектуалистическая. Платон понимал волю как некую способность души, определяющую и побуждающую активность человека. Аристотель связывал волю с разумом. Этот дуализм в той или иной форме сохранился и до сего времени. Ни в одном из учебных пособий по высшей нервной деятельности, вышедшем за последние десятилетия, эта проблема даже не упоминается, как будто ее нет вообще.
Ни в одном из учебных пособий по высшей нервной деятельности, вышедшем за последние десятилетия, эта проблема даже не упоминается, как будто ее нет вообще. Однако это не мешает ученым в одном случае отождествлять волю и мотивацию, а в другом — отрывать их друг от друга. И то и другое приводит в итоге к тому, что мотивация в большинстве случаев исследуется как самостоятельная проблема. Вследствие этого воля и мотивация в качестве побудителей и регуляторов деятельности рассматриваются как самостоятельные психические феномены. Например, В. И. Селиванов заметил, что «несомненной заслугой научной психологии является установление тесной связи воли человека с его системой побуждений» [1971, с. 9]. Моя же позиция состоит в том, что необходимо говорить не просто о связи воли и мотивации, а о включенности мотивации человека в его волю. Еще Н. Ах [Ach, 1905] писал, что из двух сторон проблемы воли — осуществление намерения и детерминация — в научных работах изучалась только вторая сторона. Тем самым он включил мотивацию в волю.
Однако это не мешает ученым в одном случае отождествлять волю и мотивацию, а в другом — отрывать их друг от друга. И то и другое приводит в итоге к тому, что мотивация в большинстве случаев исследуется как самостоятельная проблема. Вследствие этого воля и мотивация в качестве побудителей и регуляторов деятельности рассматриваются как самостоятельные психические феномены. Например, В. И. Селиванов заметил, что «несомненной заслугой научной психологии является установление тесной связи воли человека с его системой побуждений» [1971, с. 9]. Моя же позиция состоит в том, что необходимо говорить не просто о связи воли и мотивации, а о включенности мотивации человека в его волю. Еще Н. Ах [Ach, 1905] писал, что из двух сторон проблемы воли — осуществление намерения и детерминация — в научных работах изучалась только вторая сторона. Тем самым он включил мотивацию в волю.
 В конце книги приведены научный и бытовой волевой словарь терминов и фраз, а также методы и методики изучения волевой регуляции.
В конце книги приведены научный и бытовой волевой словарь терминов и фраз, а также методы и методики изучения волевой регуляции. 1. Виды механизмов детерминации поведения
1. Виды механизмов детерминации поведения Декарт (первая половина XVII в.), говоривший о маши-нообразном характере поведения человека и животных. Однако машинообраз-ность, рефлекс Р. Декарт относил только к неосознаваемым (телесным) функциям, куда, между прочим, он включил и ряд психических функций (ощущение, восприятие, представления, память, воображение, аффекты). Собственно психическим Р. Декарт считал только то, что пронизывается разумом или осознается мыслящей субстанцией. Наличие двух субстанций (телесной и духовной) привело к психофизическому параллелизму в понимании механизмов управления жизнедеятельностью и поведением человека, существованию двух независимых друг от друга механизмов, которые иногда вступают во взаимодействие друг с другом. Местом встречи духовного и телесного Р. Декарт считал шишковидную железу, с его точки зрения, — орган мыслящей субстанции.
Декарт (первая половина XVII в.), говоривший о маши-нообразном характере поведения человека и животных. Однако машинообраз-ность, рефлекс Р. Декарт относил только к неосознаваемым (телесным) функциям, куда, между прочим, он включил и ряд психических функций (ощущение, восприятие, представления, память, воображение, аффекты). Собственно психическим Р. Декарт считал только то, что пронизывается разумом или осознается мыслящей субстанцией. Наличие двух субстанций (телесной и духовной) привело к психофизическому параллелизму в понимании механизмов управления жизнедеятельностью и поведением человека, существованию двух независимых друг от друга механизмов, которые иногда вступают во взаимодействие друг с другом. Местом встречи духовного и телесного Р. Декарт считал шишковидную железу, с его точки зрения, — орган мыслящей субстанции. С точки зрения волюнтаристической психологии, считающей волю основным принципом психической жизни, нет ничего невозможного в том, что все действия и движения живых существ вначале были произвольны, а затем, по мере повторения и привыкания, сделались механическими. С этой точки зрения и рефлекс когда-то на первых ступенях своего возникновения был также произвольным, сознательным двигательным актом, а затем механизировался.
С точки зрения волюнтаристической психологии, считающей волю основным принципом психической жизни, нет ничего невозможного в том, что все действия и движения живых существ вначале были произвольны, а затем, по мере повторения и привыкания, сделались механическими. С этой точки зрения и рефлекс когда-то на первых ступенях своего возникновения был также произвольным, сознательным двигательным актом, а затем механизировался. Эти двигательные представления и явились, согласно упомянутой выше теории, зачатками сознательных волевых актов. Когда человек хочет чего-нибудь достигнуть, то в его сознании возникает, с одной стороны, представление о цели данного действия, а с другой стороны — представление о тех движениях, которые нужно совершить для достижения этой цели.
Эти двигательные представления и явились, согласно упомянутой выше теории, зачатками сознательных волевых актов. Когда человек хочет чего-нибудь достигнуть, то в его сознании возникает, с одной стороны, представление о цели данного действия, а с другой стороны — представление о тех движениях, которые нужно совершить для достижения этой цели. На первые позиции в изучении механизмов управления поведением вышли физиологи. И здесь в первую очередь надо назвать великого русского ученого И. М. Сеченова.
На первые позиции в изучении механизмов управления поведением вышли физиологи. И здесь в первую очередь надо назвать великого русского ученого И. М. Сеченова. Воля не есть какой-то безличный агент, распоряжающийся только движением, — это и деятельная сторона разума и морального чувства, управляющая движением во имя того или другого и часто наперекор даже чувству самосохранения… Эта-то ярко осознаваемая возможность, выражающаяся в словах “я хочу и сделаю”, и есть та неприступная с виду цитадель, в которой сидит обыденное учение о произвольности» [1953, с. 177–178].
Воля не есть какой-то безличный агент, распоряжающийся только движением, — это и деятельная сторона разума и морального чувства, управляющая движением во имя того или другого и часто наперекор даже чувству самосохранения… Эта-то ярко осознаваемая возможность, выражающаяся в словах “я хочу и сделаю”, и есть та неприступная с виду цитадель, в которой сидит обыденное учение о произвольности» [1953, с. 177–178]. М. Сеченова на произвольность поведения было утеряно, в частности исчезло понимание психологических механизмов. Произвольная регуляция свелась к условно-рефлекторной, и поведение человека, не говоря уже о поведении животных, во многом опять стало рассматриваться как машино-образное.
М. Сеченова на произвольность поведения было утеряно, в частности исчезло понимание психологических механизмов. Произвольная регуляция свелась к условно-рефлекторной, и поведение человека, не говоря уже о поведении животных, во многом опять стало рассматриваться как машино-образное. С. Пушкина: «Волю первую твою / Я исполню как мою»; или, например, в обыденном языке «делать что-то насильно» означает «делать против своей воли, желания»), то как проявление силы характера (противопоставление: волевой — безвольный). Этот разнобой в обыденном понимании воли нашел отражение и в научном ее понимании двумя противоборствующими направлениями. Одно из них связано со свободой воли, свободой выбора, независимо от внешних обстоятельств, другое — с детерминизмом, с внешней обусловленностью поведения человека, которая превращает его чуть ли не в автомат.
С. Пушкина: «Волю первую твою / Я исполню как мою»; или, например, в обыденном языке «делать что-то насильно» означает «делать против своей воли, желания»), то как проявление силы характера (противопоставление: волевой — безвольный). Этот разнобой в обыденном понимании воли нашел отражение и в научном ее понимании двумя противоборствующими направлениями. Одно из них связано со свободой воли, свободой выбора, независимо от внешних обстоятельств, другое — с детерминизмом, с внешней обусловленностью поведения человека, которая превращает его чуть ли не в автомат.
 Во-первых, определенные, входящие в волевой процесс представления, более или менее окрашенные в чувствования, находятся в непосредственной связи с конечной стадией, волевым поступком, и последний подготовляется этой связью. Мы называем такие подготовляющие, связанные с чувствованиями, представления мотивами или «побудительными причинами» действия, «побуждениями» к поступку. Во-вторых, эта конечная стадия состоит из характерных чувствований, которые повторяются при всех волевых явлениях в сходной по существу форме. Обыкновенно мы называем их чувствованиями деятельности, активности. Они слагаются… из чувствований возбуждения, напряжения и разряда. При этом возбуждение и напряжение предшествуют заключительному действию, разряд в связи с возбуждением сопровождает его и продолжается еще некоторое время спустя.
Во-первых, определенные, входящие в волевой процесс представления, более или менее окрашенные в чувствования, находятся в непосредственной связи с конечной стадией, волевым поступком, и последний подготовляется этой связью. Мы называем такие подготовляющие, связанные с чувствованиями, представления мотивами или «побудительными причинами» действия, «побуждениями» к поступку. Во-вторых, эта конечная стадия состоит из характерных чувствований, которые повторяются при всех волевых явлениях в сходной по существу форме. Обыкновенно мы называем их чувствованиями деятельности, активности. Они слагаются… из чувствований возбуждения, напряжения и разряда. При этом возбуждение и напряжение предшествуют заключительному действию, разряд в связи с возбуждением сопровождает его и продолжается еще некоторое время спустя. Г. Тукмачев) Ассистент кафедры травматологии и ортопедии
Г. Тукмачев) Ассистент кафедры травматологии и ортопедииВоля у делового человека
Отправить статью или инфоповод
3 ноября 2010
3101
Поведение и деятельность человека стимулируется и регулируется не только эмоциями и чувствами, но и волей. Воля дает возможность сознательно управлять своими внутренними психическими и внешними физическими действиями в самых сложных жизненных ситуациях. К волевой регуляции прибегает человек только в том случае, когда ему необходимо преодолеть трудности, возникающие на пути к достижению поставленной цели. Во всех других случаях регуляция может иметь не волевой, а преднамеренный характер, не требующий никаких усилий от личности. Можно совершать самые разнообразные сложные действия, но они не будут являться волевыми до тех пор, пока человек не будет заставлять себя осуществлять их.
Воля дает возможность сознательно управлять своими внутренними психическими и внешними физическими действиями в самых сложных жизненных ситуациях. К волевой регуляции прибегает человек только в том случае, когда ему необходимо преодолеть трудности, возникающие на пути к достижению поставленной цели. Во всех других случаях регуляция может иметь не волевой, а преднамеренный характер, не требующий никаких усилий от личности. Можно совершать самые разнообразные сложные действия, но они не будут являться волевыми до тех пор, пока человек не будет заставлять себя осуществлять их.
Волевые действия, как и все сознательные действия, имеют одну и ту же общую структуру. Побуждается любое сознательное действие определенным мотивом (потребностью). Затем ставится цель, направленная на предмет, посредством которого будет удовлетворяться потребность. Поскольку одновременно может возникнуть несколько мотивов и удовлетворяться они могут посредством различных объектов, то возникает необходимость принять решение — какой мотив должен прежде всего удовлетворяться и на какой объект должна быть направлена цель. Дальше следует планирование действия и выбор средств, при помощи которых будет достигнута цель. Следующим этапом является реализация действия и получение результатов. Заканчивается действие оценкой полученного результата и осмыслением того, достигнута ли поставленная цель или нет.
Дальше следует планирование действия и выбор средств, при помощи которых будет достигнута цель. Следующим этапом является реализация действия и получение результатов. Заканчивается действие оценкой полученного результата и осмыслением того, достигнута ли поставленная цель или нет.
Что же такое воля? Одни психологи считают, что воля — это психический процесс, другие, что — это субъективное состояние, третьи, что — она психическое свойство личности.
Воля — это напряженное психическое состояние личности, мобилизирующее все ресурсы человека для преодоления трудностей, возникших на пути к достижению поставленных целей. Какие же изменения должны произойти в преднамеренном действии, чтобы оно стало волевым?
Прежде всего изменяется мотивационная сфера. Мотива, возникшего на основе желания уже недостаточно. Необходим дополнительный мотив, который возникает при необходимости действовать не так как «я» хочу, а так как «надо».
В связи с этим изменяется смысловая оценка мотива. Теперь личность должна руководствоваться в своем поведении не личными желаниями и намерениями, а чувством долга и ответственности перед другими людьми. Но одно дело понимать, что ты должен(а) поступать соответствующим образом, а другое дело осуществлять это на практике. Вот здесь и необходима воля, чтобы сделать усилие.
Наконец, самые сложные волевые усилия надо проявить при реализации волевого поведения, когда при его осуществлении возникают внутренние и внешние препятствия. Здесь, чаще всего, и необходимо проявить волю для того, чтобы мобилизовать все психические и физические ресурсы для их преодоления.
Внешним фактором, влияющим на волевое поведение, являются те обстоятельства, в которых находится человек, и те требования, которые предъявляют к нему окружающие люди. Но, как известно, внешние факторы оказывают влияние на поведение, преломляясь через внутренние психические состояния человека. Поэтому выполнять или не выполнять предъявляемые к нему требования решает сам человек. Если он принимает эти требования, то у него возникает чувство долга, которое и заставляет его совершать волевое действие. Но чтобы это произошло, необходимо, чтобы заданное действие превратилось в личностно значимое и нравственно мотивированное действие.
Поэтому выполнять или не выполнять предъявляемые к нему требования решает сам человек. Если он принимает эти требования, то у него возникает чувство долга, которое и заставляет его совершать волевое действие. Но чтобы это произошло, необходимо, чтобы заданное действие превратилось в личностно значимое и нравственно мотивированное действие.
Волевые свойства личности
Воля не только стимулирует активность человека, направленную на преодоление трудностей, но и тормозит ее проявление, когда это необходимо для достижения цели. Благодаря побудительной и тормозной функциям воля дает возможность человеку регулировать свою деятельность и поведение в самых сложных условиях. Эти функции воли направлены на преодоление внешних и внутренних препятствий и требуют от человека напряжения всех душевных и физических сил. Когда состояние напряжения, направленное на осуществление побудительной и тормозной функции воли, проявляется повсеместно, оно закрепляется и становится волевым свойством или качеством личности.
Одни из этих свойств связаны с побудительной функцией воли, другие — с тормозной. Таких свойств насчитывается у человека довольно много. Причем, они могут иметь как положительный, так и отрицательный характер. Положительные свойства способствуют преодолению внутренних и внешних препятствий, отрицательные — препятствуют.
Среди качеств, присущих волевой личности, выделяют важнейшие из них: самостоятельность, решительность, настойчивость, упорство, выдержка и самообладание.
Самостоятельность — волевое качество, которое проявляется в способности человека, по своей инициативе ставить цели и осуществлять их, преодолевая препятствия. Самостоятельный человек уверен в правильности поставленной цели и будет бороться за ее достижение всеми силами. В то же время самостоятельность не исключает использование советов и предложений других людей, направленных на оценку возможности добиться поставленной цели.
Противоположными самостоятельности качествами являют внушаемость и негативизм. Внушаемости подвержены безвольные люди, которые не знают как им поступить в сложившейся ситуации и которые всегда ждут совета или указаний от других людей. Они часто сомневаются в правильности и целесообразности своих действий и легко попадают под влияние эгоистичных безнравственных людей.
Внушаемости подвержены безвольные люди, которые не знают как им поступить в сложившейся ситуации и которые всегда ждут совета или указаний от других людей. Они часто сомневаются в правильности и целесообразности своих действий и легко попадают под влияние эгоистичных безнравственных людей.
Негативизм — отрицательное волевое качество, под влиянием которого личность совершает действия противоположные тем правильным и целесообразным советам, которые дают ей другие люди.
Решительность — одно из важных волевых свойств личности, проявляющееся на начальном этапе волевого поведения, когда личность должна сделать усилие при выборе цели действия. Решительный человек способен быстро выбрать наиболее важную цель, всесторонне обдумать способы ее достижения и предусмотреть возможные последствия своего поведения.
Нерешительность — отрицательное волевое качество, которое мешает человеку быстро принять правильное решение и осуществить волевое действие. Нерешительный человек проявляет колебания при выборе цели, не знает какую цель ему предпочесть, испытывает сомнения в правильности выбранной цели, боится возможных последствий своих действий..
Нерешительный человек проявляет колебания при выборе цели, не знает какую цель ему предпочесть, испытывает сомнения в правильности выбранной цели, боится возможных последствий своих действий..
Настойчивость — самое важное волевое качество, проявляющееся в способности человека терпеливо преодолевать все трудности, возникающие на пути к осуществлению цели. Это качество присуще людям, которые могут проявлять волевые усилия в течение длительного времени для того чтобы как можно лучше решить поставленную задачу и добиться наиболее высоких результатов. Настойчивый человек планомерно и неуклонно идет к намеченной цели, невзирая на все препятствия, встречающиеся на его пути. Он может кропотливо шаг за шагом идти по намеченному пути, не останавливаясь при неудаче и не поддаваясь никаким сомнениям и противодействиям со стороны других людей. Этот человек может настоять на своем, убедить других в своей правоте и мобилизовать их на решение поставленной задачи. Люди, не обладающие настойчивостью, проявляют нетерпеливость и поспешность в своих действиях, стремясь как можно быстрее прийти к намеченной цели, хотя не всегда им это удается.
Люди, не обладающие настойчивостью, проявляют нетерпеливость и поспешность в своих действиях, стремясь как можно быстрее прийти к намеченной цели, хотя не всегда им это удается.
Упорство — волевое качество, помогающее человеку добиться, во что бы то ни стало, осуществления поставленной цели, не взирая на все преграды и противодействия. Упорный человек убежден в правильности выбранного пути, понимает целесообразность своих действий и необходимость получения нужных результатов. Если при сложившихся обстоятельствах достижение поставленной цели оказалось нецелесообразным, то человек, идущий до этого упорно к ней, может отказаться от нее или отложить ее достижение до более подходящего времени.
Упрямство — является отрицательным волевым качеством, противоположным упорству. Упрямый человек безрассудно стремится к достижению поставленной цели, хотя она не имеет для него большого значения и не может быть реализована в данный момент. Однако, несмотря на это он упрямо продолжает действовать, руководствуясь только своими узко эгоистическими желаниями и соображениями. Как правило, упрямый человек не только не может достигнуть поставленной цели, но часто получает результаты обратные тем, которые он ожидал.
Как правило, упрямый человек не только не может достигнуть поставленной цели, но часто получает результаты обратные тем, которые он ожидал.
Выдержка — одно из волевых качеств, выполняющих тормозную функцию. Она дает возможность человеку проявить большое напряжение воли и выдержать чрезмерную психическую и физическую нагрузку, необходимую для достижения поставленной цели. Выдержка может проявляться в стойкости человека, в его способности противостоять неблагоприятным факторам и довести дело до конца, даже в экстремальной ситуации. Сдержанный человек не будет действовать необдуманно. Он здраво оценит обстановку и свои возможности, тщательно спланирует свои действия и выберет наиболее подходящий момент для достижения цели. Если нужно он может прекратить свои действия, отложить начатое дело до того времени, когда будут созданы наиболее благоприятные условия.
Самообладание — волевое свойство, обеспечивающее человеку способность осуществлять саморегуляцию в самых сложных, экстремальных условиях существования, мобилизуя все свои психические и физические ресурсы.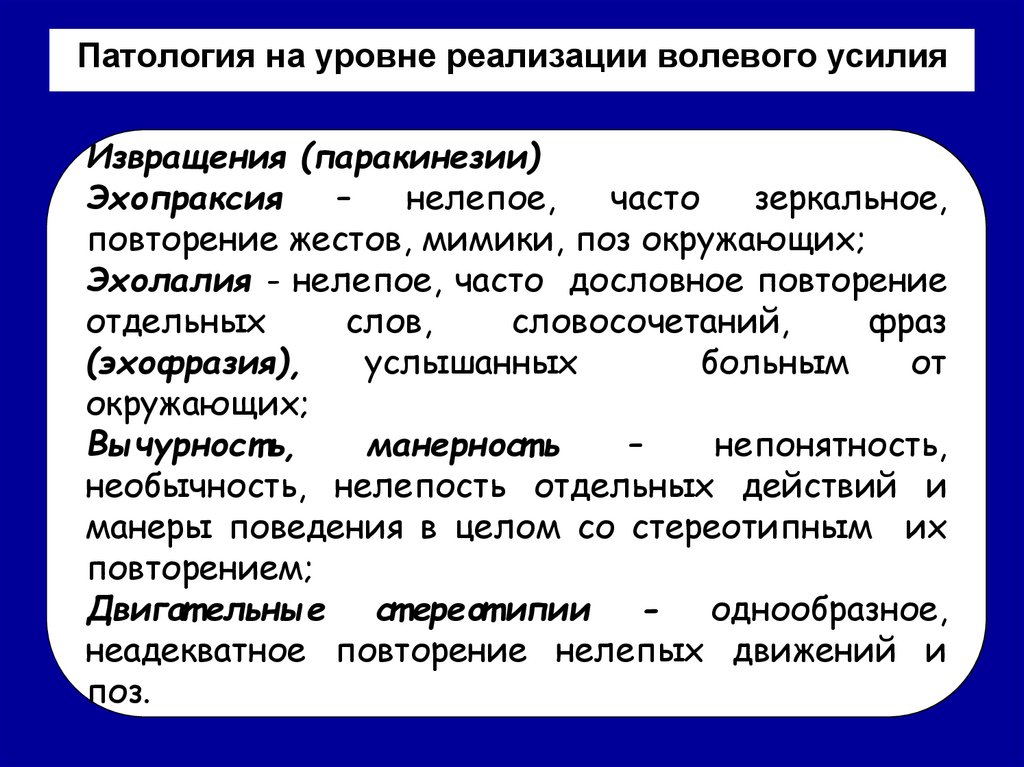 Самообладание нужно часто проявлять человеку не только в обыденной жизни, но и в условиях опасных для его жизни. Оно помогает человеку преодолеть страх, панику и малодушие. Человек, владеющий собой, уверен в своих силах, способен целесообразно действовать в любой ситуации и достигнуть высоких результатов в своем поведении и деятельности.
Самообладание нужно часто проявлять человеку не только в обыденной жизни, но и в условиях опасных для его жизни. Оно помогает человеку преодолеть страх, панику и малодушие. Человек, владеющий собой, уверен в своих силах, способен целесообразно действовать в любой ситуации и достигнуть высоких результатов в своем поведении и деятельности.
Все эти качества не существуют в готовом виде у человека, а формируются и развиваются в процессе жизни. В детском возрасте их формирование осуществляется под влиянием воспитания и игровой деятельности. Особенно большое значение в развитии волевых качеств имеет игра. Ролевые игры и игры с правилами побуждают детей проявлять волевые усилия для того, чтобы наилучшим образом выполнить свою роль и добиться при выполнении правил более высоких результатов по сравнению с другими участниками игры.
В школьном возрасте развитие воли происходит под влиянием учебной деятельности, которая является обязательной и требует от учащихся осуществлять свое поведение не так «как хочется», а так как «надо». Для успешного усвоения знаний, навыков и умений учащиеся должны все время напрягать свои умственные и физические силы, проявлять настойчивость и упорство для преодоления возникающих трудностей.
Для успешного усвоения знаний, навыков и умений учащиеся должны все время напрягать свои умственные и физические силы, проявлять настойчивость и упорство для преодоления возникающих трудностей.
Огромное значение в развитии волевых качеств имеет самовоспитание. Ни в какой другой сфере психической деятельности самовоспитание не играет такой роли, как в развитии воли. Только самовоспитание может дать человеку возможность управлять собой, проявлять волевые усилия, мобилизовать все свои ресурсы для преодоления трудностей, побеждать отрицательные качества личности и вредные привычки.
Существует ряд правил и приемов воспитания и воли, которые надо знать и по возможности соблюдать.
Волевые качества следует проявлять во всех видах деятельности и не только в экстремальных ситуациях, но и в повседневной жизни.
Стараться ставить только достижимые цели. Нельзя браться за такие задачи, которые заведомо не могу быть выполнены.
Поставленная цель должна быть достигнута. Любое дело надо доводить до конца, не откладывать его окончание на неопределенное время.
Не следует сразу пытаться преодолевать сравнительно большие трудности. Надо сначала научиться преодолевать несложные препятствия. При неудаче не следует отчаиваться. Надо снова и снова пытаться преодолеть трудности, проявляя настойчивость и упорство.
Если не получается какое-либо дело не бросайте его. Проявите выдержку и терпение, начните все сначала, исправьте допущенные ошибки, придумайте более рациональные способы и приемы его осуществления.
Оказавшись в экстремальной ситуации не теряй самообладания, мобилизуйте все свои силы и возможности для достойного выхода из нее. Постарайся, чтобы принятое решение было выполнено несмотря ни на какие препятствия.
Приступая к делу сначала спланируйте его выполнение, потом предусмотрите возможные трудности и способы их преодоления, а также подумайте о результатах своих действий.
Прокопий Афанасьевич Сорокун, доктор психологических наук, профессор Псковского государственного педагогического университета им. С.М. Кирова, заслуженный работник высшей школы РФ.
Источник: Elitarium.ru
Если вы заметили опечатку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Закрыть
Автоматизация бухгалтерии
для любого бизнеса
Попробовать бесплатно
Формирование воли у младших школьников
Воля — очень многогранное понятие. Волевые качества личности являются стержневой стороной характера человека, и их воспитанию должно быть уделено серьезное внимание. В учебной деятельности и в коллективе сверстников у младшего школьника в первую очередь формируются такие волевые черты характера, как самостоятельность, уверенность в своих силах, настойчивость, выдержка. Поэтому родителям следует сосредоточиться на формировании таких компонентов воли, как:
— умение сдерживать непосредственные импульсы и желания в связи с требованиями социального окружения, то есть умение сознательно управлять своими действиями;
— умение совершать волевое усилие, мобилизовываться в трудной ситуации, доводить начатое дело до конца.
Уже в первые месяцы перед первоклассником встает гора школьных правил, которые необходимо быстро усвоить. В первое время дети нарушают правила поведения чаще потому, что не умеют сдерживать себя и не имеют соответствующих привычек.
Руководящая роль в формировании правильного поведения школьников принадлежит взрослым (учителю, родителям, старшим детям). Однако это руководство не должно ущемлять самостоятельности детей, ибо излишняя опека, выполнение работы за них, подсказывающие вопросы и другие подобные действия старших формируют черты пассивности у младшего школьника. Контроль взрослых за проявлением волевого поведения от 1 к 4 классу должен снижаться, но не исчезать полностью.
Имеются две воспитательные крайности, каждая из которых таит в себе серьёзную опасность. С одной стороны, это излишняя опека родителей лишает ребёнка необходимости прилагать какие-либо усилия. С другой стороны — перегрузка детей непосильными заданиями. В обоих случаях формируется привычка бросать начатое дело незавершённым.
В обоих случаях формируется привычка бросать начатое дело незавершённым.
Родителям надо запастись терпением, разъясняя и показывая ребенку, как вести себя правильно. Вследствие конкретного характера мышления младшие школьники нуждаются в показе: ребенок должен знать не только, что делать, но и как делать. Позже у него появляется умение сдерживаться, подчиняться режиму жизни школы и распорядку после школы, организовывать выполнение домашних заданий и свой досуг.
Взрослым следует помнить, что для младшего школьника очень важна доступность целей. Деятельность, направленная на решение доступных для ученика задач, приобретает целенаправленность. Разрешимая задача, создавая объективную возможность успеха, заставляет ребенка мобилизовать силы для достижения цели, проявить организованность, терпение, настойчивость. Для начинающего школьника разрешимость задачи часто определяется не только тем, в какой мере он владеет средствами для ее решения, но и тем, насколько ему видна цель.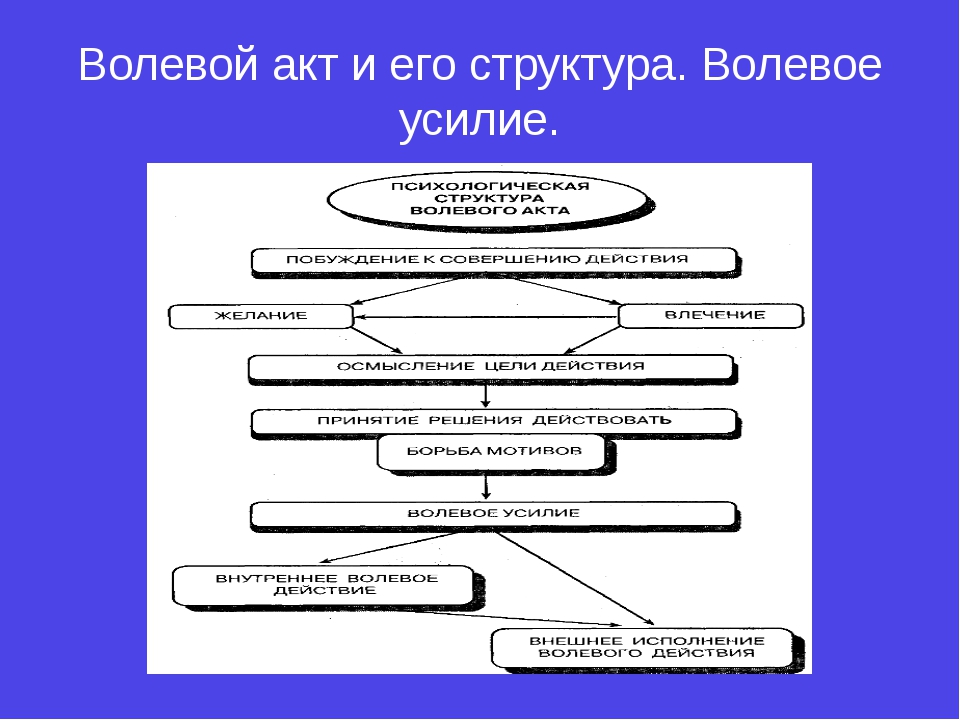 С точки зрения волевой регуляции поведения и деятельности младшего школьника важно, чтобы задачи (задания) были оптимальной сложности. Это обеспечивает переживание успеха вначале, делает тем самым цель более доступной, что, в свою очередь, активизирует дальнейшие усилия. Слишком трудные задания могут вызвать отрицательные переживания школьника, отказ от усилий. Слишком легкие задания также не способствуют развитию воли, так как учащийся привыкает работать без особых усилий.
С точки зрения волевой регуляции поведения и деятельности младшего школьника важно, чтобы задачи (задания) были оптимальной сложности. Это обеспечивает переживание успеха вначале, делает тем самым цель более доступной, что, в свою очередь, активизирует дальнейшие усилия. Слишком трудные задания могут вызвать отрицательные переживания школьника, отказ от усилий. Слишком легкие задания также не способствуют развитию воли, так как учащийся привыкает работать без особых усилий.
Волевое поведение школьника развивается в значительной степени под влиянием учебной деятельности, которая предъявляет ребенку все новые и более серьезные требования. Учебная деятельность способствует развитию произвольности познавательных процессов — произвольного восприятия, произвольной памяти, произвольного внимания и пр.
Эта происходит только в том случае, если учебная деятельность с самого начала обучения приобретает для школьника личностный смысл, становится ему интересной и значимой. В процессе обучения и развития волевые качества младшего школьника совершенствуются. Дети начинают проявлять целеустремленность, решительность, настойчивость, выдержку, смелость, дисциплинированность.
В процессе обучения и развития волевые качества младшего школьника совершенствуются. Дети начинают проявлять целеустремленность, решительность, настойчивость, выдержку, смелость, дисциплинированность.
Советы родителям:
— доводить раз начатое дело до конца;
— не делайте за ребенка то, что он в состоянии сделать самостоятельно, или чему может научиться сам, а лишь обеспечивайте условия выполнения деятельности;
— поддерживайте чувство радости от достигнутого результата;
— одобряйте ребёнка, внушая ему уверенности в том, что он сумеет выполнить трудное задание, например, «Я верю, у тебя все получится»;
— подводите ребенка к рациональному решению, а не решайте за него;
— требуйте от себя того, что требуете от ребенка;
— предъявляемые требования должны быть обоснованы и выполнимы, обдуманны и немногочисленны;
— полезны различные игры по правилам: шашки, детское домино и другие.
Развитие у ребенка воли — огромный труд. От того справитесь ли вы с этой задачей, будет зависеть успешность ваших детей.
Кодочигова И.И., методист
Алтайского краевого центра ППМС-помощи
Материал подготовлен на основе источников:
Завьялова Н.Ю. Особенности воли младших школьников // Образование и воспитание, 2017. — №11. С. 19-21.
Хухлаева О.В. В каждом ребенке — солнце? — М: Генезис, 2009. — 317 с.
Повторяющиеся максимальные произвольные сокращения при травме спинного мозга человека: начальное увеличение крутящего момента и снижение утомляемости
1. Castro MJ, Apple DF, Jr, Staron RS, et al. Влияние полного повреждения спинного мозга на скелетные мышцы в течение 6 месяцев после травмы. J Appl Physiol. 1999; 86: 350–358. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
2. Шилдс РК. Утомляемость, релаксационные свойства и электромиографические реакции парализованной камбаловидной мышцы человека. J Нейрофизиол. 1995; 73: 2195–2206. [PubMed] [Академия Google]
3. Crameri RM, Weston AR, Rutkowski S, et al. Эффекты тренировки ног с электростимуляцией во время острой фазы травмы спинного мозга: экспериментальное исследование. Eur J Appl Physiol. 2000; 83: 409–415. [PubMed] [Google Scholar]
4. Talmadge RJ, Castro MJ, Apple DF, Jr, et al. Фенотипические адаптации в мышечных волокнах человека через 6 и 24 недели после травмы спинного мозга. J Appl Physiol. 2002; 92: 147–154. [PubMed] [Google Scholar]
5. Olive JL, Dudley GA, McCully KK. Сосудистое ремоделирование после травмы спинного мозга. Медицинские спортивные упражнения. 2003;35:901–907. [PubMed] [Google Scholar]
6. Gandevia SC. Спинальные и супраспинальные факторы мышечного утомления человека. Physiol Rev. 2001; 81: 1725–1789. [PubMed] [Google Scholar]
7. Gerrits HL, De Haan A, Hopman MT, et al. Сократительные свойства четырехглавой мышцы у лиц с травмой спинного мозга. Мышечный нерв. 1999; 22:1249–1256. [PubMed] [Google Scholar]
Gerrits HL, De Haan A, Hopman MT, et al. Сократительные свойства четырехглавой мышцы у лиц с травмой спинного мозга. Мышечный нерв. 1999; 22:1249–1256. [PubMed] [Google Scholar]
8. Шилдс Р.К., Дадли-Явороски С. Скелетно-мышечная пластичность после острой травмы спинного мозга: эффекты длительной нейромышечной электростимуляции. J Нейрофизиол. 2006;95:2380–2390. [Бесплатная статья PMC] [PubMed] [Google Scholar]
9. Томас К.К., дель Валье А. Роль модуляции частоты двигательных единиц по сравнению с рекрутированием в повторных субмаксимальных произвольных сокращениях, выполняемых контрольной группой и субъектами с травмами спинного мозга. J Электромиогр Кинезиол. 2001; 11: 217–229. [PubMed] [Google Scholar]
10. Thomas CK, Tucker ME, Bigland-Ritchie B. Произвольная мышечная слабость и коактивация после хронической травмы шейного отдела спинного мозга. J Нейротравма. 1998; 15: 149–161. [PubMed] [Академия Google]
11. Каланси Б., Молано М.Р., Бротон Дж.Г. Эпидемиология и демография острого повреждения спинного мозга в крупных городских условиях. J Спинной мозг Мед. 2005; 28:92–96. [PubMed] [Google Scholar]
J Спинной мозг Мед. 2005; 28:92–96. [PubMed] [Google Scholar]
12. Russ DW, Kent-Braun JA. Половые различия в утомляемости скелетных мышц человека в условиях ишемии нивелируются. J Appl Physiol. 2003; 94: 2414–2422. [PubMed] [Google Scholar]
13. Шилдс РК. Мышечная, скелетная и нервная адаптация после повреждения спинного мозга. J Orthop Sports Phys Ther. 2002; 32: 65–74. [Бесплатная статья PMC] [PubMed] [Google Scholar]
14. Thomas CK, Zijdewind I. Усталость мышц, ослабленных гибелью мотонейронов. Мышечный нерв. 2006; 33:21–41. [PubMed] [Google Scholar]
15. Американская ассоциация травм позвоночника. Международные стандарты неврологической и функциональной классификации травм спинного мозга. Чикаго: АЗИЯ; 1994. [Google Scholar]
16. Миллер М., Даунхэм Д., Лекселл Дж. Наложение одиночного импульса и электростимуляции последовательностью импульсов: количественная оценка во время субмаксимального изометрического разгибания колена у молодых здоровых мужчин. Мышечный нерв. 1999;22:1038–1046. [PubMed] [Google Scholar]
Мышечный нерв. 1999;22:1038–1046. [PubMed] [Google Scholar]
17. Кент-Браун Дж. А., Ле Блан Р. Количественная оценка отказа центральной активации во время максимальных произвольных сокращений у людей. Мышечный нерв. 1996; 19: 861–869. [PubMed] [Google Scholar]
18. Kendall TL, Black CD, Elder CP, et al. Определение степени активации нейронов при максимальном усилии. Медицинские спортивные упражнения. 2006; 38: 1470–1475. [PubMed] [Google Scholar]
19. Kooistra RD, de Ruiter CJ, de Haan A. Традиционно оцененная произвольная активация не отражает относительное произвольное производство крутящего момента. Eur J Appl Physiol. 2007;100:309–320. [Бесплатная статья PMC] [PubMed] [Google Scholar]
20. Herbert RD, Gandevia SC. Интерполяция подергиваний в мышцах человека: механизмы и последствия для измерения произвольной активации. J Нейрофизиол. 1999; 82: 2271–2283. [PubMed] [Google Scholar]
21. Грегори CM, Dixon W, Bickel CS. Влияние различной частоты и продолжительности пульса на производство мышечного крутящего момента и усталость. Мышечный нерв. 2007; 35: 504–509. [PubMed] [Google Scholar]
Мышечный нерв. 2007; 35: 504–509. [PubMed] [Google Scholar]
22. Stackhouse SK, Stevens JE, Lee SC, et al. Максимальная произвольная активация в неутомленных и утомленных мышцах молодых и пожилых людей. физ. тер. 2001; 81: 1102–1109.. [PubMed] [Google Scholar]
23. Берес-Джонс Дж. А., Джонсон Т. Д., Харкема С. Дж. Клонус после повреждения спинного мозга у человека не может быть связан исключительно с повторяющимся растяжением мышц и сухожилий. Опыт Мозг Res. 2003; 149: 222–236. [PubMed] [Google Scholar]
24. Bigland-Ritchie B, Jones DA, Hosking GP, et al. Центральное и периферическое утомление при устойчивых максимальных произвольных сокращениях четырехглавой мышцы человека. Clin Sci Med. 1978; 54: 609–614. [PubMed] [Google Scholar]
25. de Ruiter CJ, Goudsmit JF, Van Tricht JA, et al. Изометрический крутящий момент, при котором прекращается реоксигенация мышц-разгибателей колена. Медицинские спортивные упражнения. 2007;39: 443–453. [PubMed] [Google Scholar]
26. Hidler JM, Harvey RL, Rymer WZ. Характеристики частотной характеристики подошвенных сгибателей голеностопного сустава у людей после травмы спинного мозга: отношение к степени спастичности. Энн Биомед Инж. 2002; 30: 969–981. [PubMed] [Google Scholar]
Hidler JM, Harvey RL, Rymer WZ. Характеристики частотной характеристики подошвенных сгибателей голеностопного сустава у людей после травмы спинного мозга: отношение к степени спастичности. Энн Биомед Инж. 2002; 30: 969–981. [PubMed] [Google Scholar]
27. Harris RL, Bobet J, Sanelli L, et al. Мышцы хвоста становятся медленными, но утомляемыми у крыс с хронической спастичностью крестцового отдела позвоночника. J Нейрофизиол. 2006;95:1124–1133. [Бесплатная статья PMC] [PubMed] [Google Scholar]
28. Джаяраман А., Грегори С.М., Боуден М. и соавт. Функция скелетных мышц нижних конечностей у лиц с неполным повреждением спинного мозга. Спинной мозг. 2006; 44: 680–687. [PubMed] [Google Scholar]
29. Грегори CM, Bickel CS. Паттерны рекрутирования в скелетных мышцах человека при электростимуляции. физ. тер. 2005; 85: 358–364. [PubMed] [Google Scholar]
30. Binder-Macleod SA, Halden EE, Jungles KA. Влияние интенсивности стимуляции на физиологические реакции двигательных единиц человека. Медицинские спортивные упражнения. 1995;27:556–565. [PubMed] [Google Scholar]
Медицинские спортивные упражнения. 1995;27:556–565. [PubMed] [Google Scholar]
31. Feiereisen P, Duchateau J, Hainaut K. Порядок рекрутирования двигательных единиц во время произвольных и электрически индуцированных сокращений передней большеберцовой мышцы. Опыт Мозг Res. 1997; 114:117–123. [PubMed] [Google Scholar]
32. Добкин Б.Х. Утомляемость в сравнении с утомляемостью, зависящей от активности, у пациентов с центральными или периферическими двигательными нарушениями. Нейрореабилитация Нейроремонт. 2008; 22:105–110. [Бесплатная статья PMC] [PubMed] [Google Scholar]
33. Gregory CM, Bowden MG, Jayaraman A, et al. Тренировки с отягощениями и восстановление опорно-двигательного аппарата после неполной травмы спинного мозга: серия случаев. Спинной мозг. 2007; 45: 522–530. [PubMed] [Академия Google]
34. Фуглеванд А.Дж., Кин Д.А. Переоценка мышечной мудрости в приводящей мышце большого пальца человека с использованием физиологических скоростей стимуляции. Дж. Физиол. 2003; 549 (часть 3): 865–875. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Физиол. 2003; 549 (часть 3): 865–875. [Бесплатная статья PMC] [PubMed] [Google Scholar]
35. Шилдс Р.К., Дадли-Явороски С., Литтманн А.Е. Постусталостная потенциация парализованной камбаловидной мышцы: свидетельство адаптации к длительной тренировке с электростимуляцией. J Appl Physiol. 2006; 101: 556–565. [Бесплатная статья PMC] [PubMed] [Google Scholar]
36. Norgaard P, Nielsen JF, Andersen H. Усиление потенциалов действия сложных мышц, вызванных транскраниальной магнитной стимуляцией, у здоровых людей после тренировки. Опыт Мозг Res. 2000; 132: 517–522. [PubMed] [Google Scholar]
37. Samii A, Wassermann EM, Ikoma K, et al. Характеристика постнагрузочного облегчения и депрессии моторных вызванных потенциалов на транскраниальную магнитную стимуляцию. Неврология. 1996; 46: 1376–1382. [PubMed] [Google Scholar]
38. Brocke J, Irlbacher K, Hauptmann B, et al. Сравнение транскраниальной магнитной и электрической стимуляции: активирует ли ТЭС внутрикорковые нейронные цепи? Клин Нейрофизиол. 2005; 116: 2748–2756. [PubMed] [Академия Google]
2005; 116: 2748–2756. [PubMed] [Академия Google]
39. Macefield G, Hagbarth KE, Gorman R, et al. Снижение поддержки веретена альфа-мотонейронов во время устойчивых произвольных сокращений. Дж. Физиол. 1991; 440:497–512. [Бесплатная статья PMC] [PubMed] [Google Scholar]
40. Martin PG, Smith JL, Butler JE, et al. Афференты, чувствительные к усталости, ингибируют разгибательные, но не сгибательные мотонейроны человека. Дж. Нейроски. 2006; 26: 4796–4802. [Бесплатная статья PMC] [PubMed] [Google Scholar]
41. Suzuki S, Hayami A, Suzuki M, et al. Снижение порогов силы рекрутирования отдельных двигательных единиц человека за счет последовательных произвольных сокращений. Опыт Мозг Res. 1990;82:227–230. [PubMed] [Google Scholar]
42. Gorassini M, Yang JF, Siu M, et al. Внутренняя активация мотонейронов человека: снижение порогов рекрутирования двигательных единиц за счет повторных сокращений. J Нейрофизиол. 2002; 87: 1859–1866. [PubMed] [Google Scholar]
43. Kiehn O, Eken T. Продолжительное возбуждение двигательных единиц: свидетельство плато-потенциалов в мотонейронах человека? J Нейрофизиол. 1997; 78: 3061–3068. [PubMed] [Google Scholar]
Kiehn O, Eken T. Продолжительное возбуждение двигательных единиц: свидетельство плато-потенциалов в мотонейронах человека? J Нейрофизиол. 1997; 78: 3061–3068. [PubMed] [Google Scholar]
44. Collins DF, Gorassini M, Bennett D, et al. Недавние данные о потенциалах плато в мотонейронах человека. Adv Exp Med Biol. 2002; 508: 227–235. [PubMed] [Академия Google]
45. Heckmann CJ, Gorassini MA, Bennett DJ. Постоянные внутренние токи в дендритах мотонейронов: последствия для двигательной активности. Мышечный нерв. 2005; 31: 135–156. [PubMed] [Google Scholar]
46. Hornby TG, Kahn JH, Wu M, et al. Временное облегчение спастических рефлексов растяжения после травмы спинного мозга человека. Дж. Физиол. 2006; 571 (часть 3): 593–604. [Бесплатная статья PMC] [PubMed] [Google Scholar]
47. Hornby TG, Rymer WZ, Benz EN, et al. Свертывание сгибательных рефлексов при хронической травме спинного мозга человека: маркер потенциалов плато нейронов? J Нейрофизиол. 2003;89: 416–426.![]() [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
48. Gorassini M, Yang JF, Siu M, et al. Внутренняя активация мотонейронов человека: возможный вклад в возбуждение двигательной единицы. J Нейрофизиол. 2002; 87: 1850–1858. [PubMed] [Google Scholar]
49. Zijdewind I, Thomas CK. Активация двигательных единиц во время и после произвольных сокращений мышц тенара человека, ослабленных травмой спинного мозга. J Нейрофизиол. 2003; 89: 2065–2071. [PubMed] [Google Scholar]
50. Hornby TG, Thompson CK, Lewek MD. Потенциальные нервно-мышечные механизмы, лежащие в основе увеличения крутящего момента во время «утомительных» сокращений при неполном повреждении спинного мозга человека. Труды Ежегодного Общества Нейронауки; Сан-Диего, Калифорния. 2007. [Google Академия]
51. Duchateau J, Balestra C, Carpentier A, et al. Рефлекторная регуляция при устойчивых и прерывистых субмаксимальных сокращениях у человека. Дж. Физиол. 2002; 541 (часть 3): 959–967. [Бесплатная статья PMC] [PubMed] [Google Scholar]
52. Фарина Д., Мерлетти Р., Энока Р.М. Извлечение нейронных стратегий из поверхностной ЭМГ. J Appl Physiol. 2004; 96: 1486–1495. [PubMed] [Google Scholar]
Фарина Д., Мерлетти Р., Энока Р.М. Извлечение нейронных стратегий из поверхностной ЭМГ. J Appl Physiol. 2004; 96: 1486–1495. [PubMed] [Google Scholar]
53. Yao W, Fuglevand RJ, Enoka RM. Синхронизация двигательных единиц увеличивает амплитуду ЭМГ и снижает стабильность силы симулированных сокращений. J Нейрофизиол. 2000; 83: 441–452. [PubMed] [Академия Google]
54. Macefield VG, Gandevia SC, Bigland-Ritchie B, et al. Скорость возбуждения мотонейронов человека активируется произвольно в отсутствие мышечной афферентной обратной связи. Дж. Физиол. 1993; 471:429–443. [Бесплатная статья PMC] [PubMed] [Google Scholar]
55. Harkema S, Hurley SL, Patel UK, et al. Пояснично-крестцовый отдел спинного мозга человека интерпретирует нагрузку при шагании. J Нейрофизиол. 1997; 77: 797–811. [PubMed] [Google Scholar]
56. Гиттманн Л. Труды симпозиума по травмам позвоночника. Эдинбург: Р. Коул Сор; 1963. Начальное лечение травматической параплегии и тетраплегии. [Google Scholar]
57. Дитц В. Спастически-спастическое двигательное расстройство. Спинной мозг. 2008;46:588. [PubMed] [Google Scholar]
Дитц В. Спастически-спастическое двигательное расстройство. Спинной мозг. 2008;46:588. [PubMed] [Google Scholar]
Поощрение произвольного вращения педалей при функциональной электрической стимуляции на велосипеде с использованием барьерных функций
1 Введение
Стационарная езда на велосипеде с помощью функциональной электрической стимуляции (ФЭС) может принести долгосрочную пользу людям с двигательными нарушениями вследствие неврологических состояний, таких как инсульт, повреждение спинного мозга, черепно-мозговая травма, церебральный паралич, рассеянный склероз и др. Johnston et al. (2008 г.); Ферранте и др. (2008 г.); Хукер и др. (1992); Янссен и др. (2008 г.); Тревизи и др. (2012). Люди с неврологическими заболеваниями могут проявлять различную степень мышечного контроля. Для людей с незначительным волевым контролем или без такового велотерапия ФЭС должна поддерживаться электродвигателем, который обеспечивает дополнительный крутящий момент на кривошипе педали для поддержания полезной частоты вращения педалей, как в таких исследованиях, как Cousin et al. (2020 г.); Хукер и др. (1992 г.); Беллман и др. (2017 г.); Дуэнас и др. (2020 г.); Тревизи и др. (2012). Когда это возможно, следует свести к минимуму поддержку электродвигателя вместо крутящего момента, создаваемого мышцами всадника либо посредством ФЭС, либо по собственной воле, что приводит к более интенсивной тренировке за счет увеличения частоты сердечных сокращений всадника и потребления кислорода Hooker et al. (1992). Тренировки с более высокой интенсивностью являются ключевым фактором в достижении долгосрочных результатов, таких как увеличение мышечной силы, выносливости сердечно-сосудистой системы, минеральной плотности костей и потребления калорий Ouellette et al. (2004 г.); Маккей-Лайонс и Макридес (2002 г.); Мор и др. (1997). В литературе по реабилитации, не относящейся к езде на велосипеде, упоминаются различные подходы помощи по мере необходимости, такие как Asl et al. (2020 г.); Дао и Ямамото (2018 г.); Пехливан и др. (2015 г.); Дин и др. (2014) поощряют добровольный вклад пользователя.
(2020 г.); Хукер и др. (1992 г.); Беллман и др. (2017 г.); Дуэнас и др. (2020 г.); Тревизи и др. (2012). Когда это возможно, следует свести к минимуму поддержку электродвигателя вместо крутящего момента, создаваемого мышцами всадника либо посредством ФЭС, либо по собственной воле, что приводит к более интенсивной тренировке за счет увеличения частоты сердечных сокращений всадника и потребления кислорода Hooker et al. (1992). Тренировки с более высокой интенсивностью являются ключевым фактором в достижении долгосрочных результатов, таких как увеличение мышечной силы, выносливости сердечно-сосудистой системы, минеральной плотности костей и потребления калорий Ouellette et al. (2004 г.); Маккей-Лайонс и Макридес (2002 г.); Мор и др. (1997). В литературе по реабилитации, не относящейся к езде на велосипеде, упоминаются различные подходы помощи по мере необходимости, такие как Asl et al. (2020 г.); Дао и Ямамото (2018 г.); Пехливан и др. (2015 г.); Дин и др. (2014) поощряют добровольный вклад пользователя. Относительно мало работ исследовали программы FES и моторизованной езды на велосипеде, основной целью которых является поощрение волевого вклада Harrington et al. (2012 г.); Роуз и др. (2020 г.); Джонстон и Уэйнрайт (2011). Целью этой работы является разработка контроллеров как для электродвигателя, так и для стимуляции ФЭС, которые облегчают произвольные циклы за счет минимизации помощи машины, обеспечивая при этом ограничение частоты вращения педалей всадника в заданном пользователем диапазоне.
Относительно мало работ исследовали программы FES и моторизованной езды на велосипеде, основной целью которых является поощрение волевого вклада Harrington et al. (2012 г.); Роуз и др. (2020 г.); Джонстон и Уэйнрайт (2011). Целью этой работы является разработка контроллеров как для электродвигателя, так и для стимуляции ФЭС, которые облегчают произвольные циклы за счет минимизации помощи машины, обеспечивая при этом ограничение частоты вращения педалей всадника в заданном пользователем диапазоне.
Кинематика ног всадника во время стационарной езды на велосипеде такова, что приложение FES к его мышцам создает существенный крутящий момент только в определенных областях цикла кривошипа. Чтобы максимизировать создание крутящего момента, схемы стимуляции часто включают прерывистые скачки, запускаемые в зависимости от угла поворота кривошипа дискретными логическими переменными. Взаимодействие результирующей непрерывной и дискретной динамики приводит к гибридной системе управления. Барьерные функции или контрольные барьерные функции (CBF) можно использовать для разработки контроллеров для гибридных систем, которые обеспечивают безопасность, представляя наборы состояний либо инвариантными вперед, либо асимптотически устойчивыми Ames et al. (2019); Магенем и Санфеличе (2021 г.); Глотфельтер и др. (2017). Эта методика основана на идеях теории управляющих функций Ляпунова (УФЛ). CLF используются для наложения определенных ограничений на вход управления, которые приводят к уменьшению функции Ляпунова для состояний вне безопасного множества Freeman and Kokotovic (1996); Санфеличе (2013). Однако подходы на основе CLF, как правило, не предоставляют конструктивных методов для проектирования управляющего входа в состояниях в безопасном наборе. Недавние разработки, касающиеся CBF, заполнили этот пробел, предоставив систематический подход для расширения входных ограничений на безопасный набор таким образом, чтобы уменьшить усилия по управлению внутренней частью набора Ames et al. (2016). Популярный подход к реализации входных ограничений, вызванных CLF или CBF, — это точечные оптимальные законы управления, которые для определенных классов динамики принимают форму квадратичных программ (QP). По сравнению с прошлыми схемами управления «помощь по мере необходимости», в которых использовались такие методы, как функции мертвой зоны Asl et al.
(2019); Магенем и Санфеличе (2021 г.); Глотфельтер и др. (2017). Эта методика основана на идеях теории управляющих функций Ляпунова (УФЛ). CLF используются для наложения определенных ограничений на вход управления, которые приводят к уменьшению функции Ляпунова для состояний вне безопасного множества Freeman and Kokotovic (1996); Санфеличе (2013). Однако подходы на основе CLF, как правило, не предоставляют конструктивных методов для проектирования управляющего входа в состояниях в безопасном наборе. Недавние разработки, касающиеся CBF, заполнили этот пробел, предоставив систематический подход для расширения входных ограничений на безопасный набор таким образом, чтобы уменьшить усилия по управлению внутренней частью набора Ames et al. (2016). Популярный подход к реализации входных ограничений, вызванных CLF или CBF, — это точечные оптимальные законы управления, которые для определенных классов динамики принимают форму квадратичных программ (QP). По сравнению с прошлыми схемами управления «помощь по мере необходимости», в которых использовались такие методы, как функции мертвой зоны Asl et al. (2020) или контроль импеданса Ding et al. (2014), барьерные функции могут ограничивать состояние в более широком классе безопасных множеств. Кроме того, функция стоимости в сопутствующем точечном оптимальном законе управления является настраиваемой, что приводит к ряду возможных контроллеров. Наша предварительная работа в Isaly et al. (2020) интегрировали обнуление CBF с надежными инструментами управления из теории Ляпунова, чтобы синтезировать QP для неопределенной, непрерывной во времени, только двигательной велосипедной системы. Контроллер в Isaly et al. (2020) ограничивает частоту вращения педалей всадника в заданном пользователем диапазоне, поощряя произвольное вращение педалей с минимальными усилиями по управлению двигателем. Однако более сложный случай, когда всадник также стимулируется ФЭС, не рассматривался.
(2020) или контроль импеданса Ding et al. (2014), барьерные функции могут ограничивать состояние в более широком классе безопасных множеств. Кроме того, функция стоимости в сопутствующем точечном оптимальном законе управления является настраиваемой, что приводит к ряду возможных контроллеров. Наша предварительная работа в Isaly et al. (2020) интегрировали обнуление CBF с надежными инструментами управления из теории Ляпунова, чтобы синтезировать QP для неопределенной, непрерывной во времени, только двигательной велосипедной системы. Контроллер в Isaly et al. (2020) ограничивает частоту вращения педалей всадника в заданном пользователем диапазоне, поощряя произвольное вращение педалей с минимальными усилиями по управлению двигателем. Однако более сложный случай, когда всадник также стимулируется ФЭС, не рассматривался.
В этой работе мы расширяем разработку Isaly et al. (2020) для учета гибридной динамики, вызванной добавлением стимуляции FES. Полученный контроллер применяет помощь в зависимости от производительности гонщика. Помощь FES применяется только тогда, когда частота шагов не может поддерживаться на целевом уровне только за счет волевых усилий. Точно так же помощь от электродвигателя применяется только тогда, когда совокупные ФЭС и волевые усилия недостаточны. Контроллер приспосабливается к широкому спектру функциональных нарушений и волевых способностей за счет настраиваемых параметров, включая номинальные управляющие входы и настраиваемую ширину безопасного диапазона. Более того, безопасность водителя обеспечивается за счет того, что электродвигатель ограничивает частоту вращения педалей водителя равномерно глобально асимптотически стабильным набором с помощью контроллера с непрерывной обратной связью. Непрерывность закона моторного контроля является улучшением по сравнению со стратегией прорыва в Rouse et al. (2020) за поощрение произвольного вращения педалей. В данной работе управляющее усилие не применялось в заданной пользователем области, а электродвигатель и ФЭС включались прерывисто на границе области.
Помощь FES применяется только тогда, когда частота шагов не может поддерживаться на целевом уровне только за счет волевых усилий. Точно так же помощь от электродвигателя применяется только тогда, когда совокупные ФЭС и волевые усилия недостаточны. Контроллер приспосабливается к широкому спектру функциональных нарушений и волевых способностей за счет настраиваемых параметров, включая номинальные управляющие входы и настраиваемую ширину безопасного диапазона. Более того, безопасность водителя обеспечивается за счет того, что электродвигатель ограничивает частоту вращения педалей водителя равномерно глобально асимптотически стабильным набором с помощью контроллера с непрерывной обратной связью. Непрерывность закона моторного контроля является улучшением по сравнению со стратегией прорыва в Rouse et al. (2020) за поощрение произвольного вращения педалей. В данной работе управляющее усилие не применялось в заданной пользователем области, а электродвигатель и ФЭС включались прерывисто на границе области. За пределами региона усилие вспомогательного управления дискретно переключалось между FES и помощью электродвигателя, чтобы гарантировать, что электродвигатель не мешает FES вызывать выходную мощность гонщика. Напротив, мы разделяем контроллеры двигателя и FES и используем более сложные инструменты проектирования для разработки закона управления двигателем, который является непрерывной функцией ошибки отслеживания частоты вращения педалей. Результатом является более комфортная тренировка для всадника, в то время как поэтапное применение FES до двигательных усилий по-прежнему позволяет отдавать приоритет выходной мощности всадника.
За пределами региона усилие вспомогательного управления дискретно переключалось между FES и помощью электродвигателя, чтобы гарантировать, что электродвигатель не мешает FES вызывать выходную мощность гонщика. Напротив, мы разделяем контроллеры двигателя и FES и используем более сложные инструменты проектирования для разработки закона управления двигателем, который является непрерывной функцией ошибки отслеживания частоты вращения педалей. Результатом является более комфортная тренировка для всадника, в то время как поэтапное применение FES до двигательных усилий по-прежнему позволяет отдавать приоритет выходной мощности всадника.
Проведены экспериментальные испытания на пяти здоровых участниках для демонстрации эффективности и универсальности разработанной системы управления. Было показано, что контроллер барьерной функции эффективно ограничивает частоту шагов до диапазона 50 ± 5 об / мин в течение всего времени, кроме незначительного, и превосходит контроллер в Rouse et al. (2020) и неконтролируемое произвольное вращение педалей для протокола, в котором приоритет отдавался минимальному изменению частоты шагов. Контроллер барьерной функции имел более низкое стандартное отклонение частоты вращения педалей (в среднем 1,4 об/мин) и ограничивал частоту вращения педалей меньшим диапазоном по сравнению со случаями сравнения, но в целом создавал больший вспомогательный крутящий момент от двигателя, чем контроллер в Rouse et al. (2020). Чтобы показать, как можно уменьшить помощь двигателя, чтобы отдать предпочтение выходной мощности гонщика, был разработан альтернативный протокол, в котором настраиваемые параметры были настроены с более широким безопасным диапазоном и номинальным сопротивлением двигателя. В альтернативном испытании двигатель создавал вспомогательный крутящий момент только 4,1% от всей продолжительности испытания.
Контроллер барьерной функции имел более низкое стандартное отклонение частоты вращения педалей (в среднем 1,4 об/мин) и ограничивал частоту вращения педалей меньшим диапазоном по сравнению со случаями сравнения, но в целом создавал больший вспомогательный крутящий момент от двигателя, чем контроллер в Rouse et al. (2020). Чтобы показать, как можно уменьшить помощь двигателя, чтобы отдать предпочтение выходной мощности гонщика, был разработан альтернативный протокол, в котором настраиваемые параметры были настроены с более широким безопасным диапазоном и номинальным сопротивлением двигателя. В альтернативном испытании двигатель создавал вспомогательный крутящий момент только 4,1% от всей продолжительности испытания.
2 Динамическая модель
2.1 Гибридные системы
Разработка в этой работе основана на структуре гибридных систем, описанной в Goebel et al. (2012). Гибридная система H=C,F,D,G с состоянием x∈X⊂Rn моделируется
H:ẋ∈Fxx∈Cx+∈Gxx∈D. (1)
(1)
Когда состояние находится в потоке множества C ⊂Rn, допускается непрерывное развитие в соответствии с многозначной картой потока F:Rn⇉Rn. Когда состояние находится в множестве переходов D⊂Rn, ему разрешается дискретно изменяться в соответствии с картой переходов G:Rn⇉Rn. Когда x ∈ C ∩ D, возможно любое поведение. Понятие решения для H точно определено в Goebel et al. (2012), деф. 2.6. Вкратце, решением задачи H является функция t,j↦ϕt,j, определенная в гибридной временной области domϕ⊂R≥0×N и параметризованная обычной временной переменной t∈R≥0 и дискретной переменной скачка j∈N . Многозначные отображения F и G отображают точки в Rn в подмножества Rn, так что, например, включение x+∈Gx представляет тот факт, что если траектория переходит из состояния ϕt,j, то ее состояние ϕt,j+1 в следующий дискретный момент времени является точкой множества Gϕt,j.
Примечание 1. Предыдущие результаты (см. Rouse et al. (2020); Bellman et al. (2017); Rouse et al. (2021)) анализировали динамическую модель в следующем разделе с использованием инструментов коммутируемых систем. Решение использовать здесь гибридную модель было мотивировано тем фактом, что инвариантность вперед через барьерные функции плохо охарактеризована для систем с переключениями, а также не так много результатов, касающихся устойчивости некомпактных множеств. Гибридные системы могут моделировать широкие классы коммутируемых систем Goebel et al. (2012 г., раздел 2.4).
Решение использовать здесь гибридную модель было мотивировано тем фактом, что инвариантность вперед через барьерные функции плохо охарактеризована для систем с переключениями, а также не так много результатов, касающихся устойчивости некомпактных множеств. Гибридные системы могут моделировать широкие классы коммутируемых систем Goebel et al. (2012 г., раздел 2.4).
2.2 Динамика без обратной связи
Аналогично уравнению. 1, можно также рассмотреть гибридные системы с входами Sanfelice (2013). Мы используем такую систему для описания конструкции управления, но представляем наш анализ устойчивости с точки зрения замкнутой системы с формой в уравнении. 1. Разомкнутая система велосипедистов моделируется как система с непрерывным временем Hu=Cu,Fu. В дальнейшем будет введена дискретная динамика за счет конструкции контроллера. Адаптация модели из нашей предыдущей работы в Bellman et al. (2017) и Isaly et al. (2020), динамика Эйлера-Лагранжа цикла моделируется с использованием карты потока
ż∈z2M−1z1τuz,u−τFz≜Fuz,u,(2)
и множество потока Cu≜R2×U. В (2) состояние z∈R2, где z 1 обозначает измеримый угол поворота коленчатого вала цикла, а z 2 — расчетная угловая скорость (эквивалентно, частота вращения педалей гонщика). Система имеет управляющие входы 1 u≜ue,uM, где ue∈R — текущий вход в электродвигатель велосипеда, а uM∈R6 — вектор входов интенсивности электростимуляции um∈R, для каждой мышцы m∈ M≜LQ,LG,LH,RQ,RG,RH. Элементы M обозначают группы четырехглавой мышцы бедра (Q), ягодичной (G) и подколенного сухожилия (H) левой и правой ноги соответственно. Управляющие входы принимают значения в множестве U≜R×UM, где UM≜0,ū6⊂R6 указывает на то, что управляющие входы мышц ограничены константой ū>0 для безопасности и комфорта всадника. Непрерывно дифференцируемая функция M:R→R>0 обозначает силы инерции от велосипеда и ног всадника. Многозначное отображение τF:R2⇉R определяет динамику системы как
В (2) состояние z∈R2, где z 1 обозначает измеримый угол поворота коленчатого вала цикла, а z 2 — расчетная угловая скорость (эквивалентно, частота вращения педалей гонщика). Система имеет управляющие входы 1 u≜ue,uM, где ue∈R — текущий вход в электродвигатель велосипеда, а uM∈R6 — вектор входов интенсивности электростимуляции um∈R, для каждой мышцы m∈ M≜LQ,LG,LH,RQ,RG,RH. Элементы M обозначают группы четырехглавой мышцы бедра (Q), ягодичной (G) и подколенного сухожилия (H) левой и правой ноги соответственно. Управляющие входы принимают значения в множестве U≜R×UM, где UM≜0,ū6⊂R6 указывает на то, что управляющие входы мышц ограничены константой ū>0 для безопасности и комфорта всадника. Непрерывно дифференцируемая функция M:R→R>0 обозначает силы инерции от велосипеда и ног всадника. Многозначное отображение τF:R2⇉R определяет динамику системы как
τFz≜τbz2+Vpzz2+Gz1+Pz+Td+Tvol,(3)
где τb:R→R обозначает неизвестный момент за счет вязкостного демпфирования в цикле, а Vp:R2→R, G:R→ R и P:R2→R представляют собой неизвестные центростремительные силы Кориолиса, силы гравитации и силы пассивной вязкоупругой ткани соответственно, применяемые комбинированной системой человеческого цикла. Вышеупомянутые функции являются непрерывными в соответствии с динамическими моделями Bellman et al. (2017) и Идсё (2002). Согласно модели Bellman et al. (2017), центростремительный-Кориолисов член связан с массой и частотой вращения соотношением Vpz=12∇Mz1z2. В уравнении 3, Tvol⊂R и Td⊂R — наборы, используемые для моделирования всех возможных значений волевого усилия всадника и других неизвестных возмущений соответственно 2 . Непрерывная функция τu:R2×U→R описывает момент, создаваемый входами управления, и определяется как
Вышеупомянутые функции являются непрерывными в соответствии с динамическими моделями Bellman et al. (2017) и Идсё (2002). Согласно модели Bellman et al. (2017), центростремительный-Кориолисов член связан с массой и частотой вращения соотношением Vpz=12∇Mz1z2. В уравнении 3, Tvol⊂R и Td⊂R — наборы, используемые для моделирования всех возможных значений волевого усилия всадника и других неизвестных возмущений соответственно 2 . Непрерывная функция τu:R2×U→R описывает момент, создаваемый входами управления, и определяется как
τuz,u≜ceue+τFESz,uM,
, где c e > 0 – известная постоянная управления электродвигателем отношение входного тока к выходному крутящему моменту. Крутящий момент, генерируемый входами ФЭС в мышцы всадника τФЭС:R2×UM→R, определяется как
τФЭСz,uM≜∑m∈Mgmzum,(4)
, где непрерывные функции gm:R2→R обозначают неопределенную эффективность управления каждой мышцы. Для каждого m∈M пусть замкнутое множество Qm⊂R обозначает часть цикла кривошипа, когда стимулируется конкретная мышца m, которая выбирается на основе минимального порога для коэффициента передачи крутящего момента каждой группы мышц. В частности, существуют кинематические мертвые зоны в цикле кривошипа, где ни одна мышца не способна создать полезный крутящий момент Cousin et al. (2020).
Следующие свойства системы велосипедист в уравнении. 2 получены из подробной динамической модели, как обсуждалось в Bellman et al. (2017).
Свойство 1. Инерционный член ограничен сверху и снизу как c̲I≤Mz1≤c̄I для всех z1∈R, где c̲I,c̄I>0 — известные константы.
Свойство 2. Параметр центростремительного Кориолиса ограничен сверху как Vpz≤cVz2 для всех z∈R2, где c V > 0 — известная константа.
Свойство 3. Момент силы тяжести ограничен сверху как Gz1≤cG для всех z1∈R, где c G > 0 — известная константа.
Свойство 4. Крутящий момент, создаваемый вязкоупругими тканями всадника, ограничен сверху как Pz≤cP1+cP2z2 для всех z∈R2, где c P1 , c P2 > 0 — известные константы.
Свойство 5. Момент за счет вязкого демпфирования ограничен сверху как τbz2≤cbz2 для всех z2∈R, где c b > 0 — известная константа.
Свойство 6. Моменты, создаваемые возмущениями системы, ограничены так, что Td=−cd,cd, где c d > 0 — известная константа.
Свойство 7. Из-за физических ограничений всадника волевой мышечный момент ограничен таким образом, что Tvol=−cvol,cvol, где c vol > 0 — известная константа.
Свойство 8. Для каждого m∈M эффективность управления мышцами ограничена сверху, так что gmz≤c̄m для всех z∈R2, где c̄m>0 — известная константа.
Свойство 9. Многозначное отображение Fu:R2×U⇉R2 внешне полунепрерывно, локально ограничено и выпуклозначно. Эти свойства следуют из непрерывности определяющих функций и свойств 6 и 7.
3 Конструкция управления
На рис. 1 показана схема расположенных в шахматном порядке областей управления для разработанной системы. Волевой диапазон — это область около заданного значения z 2d , где управляющие входы равны нулю, тем самым вынуждая гонщика крутить педали по собственному желанию (опционально может быть обеспечена номинальная помощь или сопротивление в зависимости от потребностей гонщика). ). Когда частота вращения педалей меньше, чем z 2d , помощь FES предоставляется до помощи электродвигателя. Когда частота вращения педалей превышает заданное значение, используется только электродвигатель, потому что создание резистивного крутящего момента с помощью ФЭС путем стимуляции мышц-антагонистов нежелательно. Гонщик или клиницист могут изменить количество обеспечиваемого контрольного усилия и размер контролируемых областей, используя параметры, настроенные для конкретного человека.
РИСУНОК 1 . Иллюстрация областей прикладного контролирующего усилия в зависимости от частоты вращения педалей. В произвольном диапазоне вблизи уставки z 2d усилие управления не применяется. Вход управления электродвигателем увеличивается, когда частота вращения педалей приближается к границам, определенным e H и e L , и управляющий сигнал FES делает то же самое вблизи e FES . Размер каждой области регулируется. Диапазон частоты вращения педалей между e H и e L становится асимптотически устойчивым благодаря разработанной системе управления.
3.1 Цель управления
Чтобы формализовать цель управления, мы определяем ошибку отслеживания e как отклонение состояния частоты педалирования z 2 от постоянной уставки z 2d > 0, 3
e≜z2− z2d.(5)
Основная цель управления – гарантировать безопасную и эффективную терапию путем ограничения частоты шагов всадника безопасным набором S≜{z∈R2:eL≤e≤eH}, где e L < 0 < e H — константы, определяемые пользователем. Входные данные управления FES пытаются ограничить частоту вращения педалей гонщика вторичным набором SFES≜{z∈R2:e≥eFES}. Поскольку входы FES доступны только периодически и должны быть ниже порога комфорта ū, частота педалирования может не оставаться в пределах SFES. Тем не менее, эта конструкция полезна для целей дизайна. Чтобы обеспечить активацию стимуляции ФЭС до добавления крутящего момента электродвигателем, в конструкции указано, что e L < e FES < 0,
Цель состоит в том, чтобы систематически синтезировать контроллеры, которые делают данный набор состояний равномерно глобально асимптотически устойчивым (UGAS), используя при этом минимальные требуемые усилия внутри интересующего набора. 4 Объединяя идеи из теории CLF с последними разработками, касающимися CBF, эта задача решается с помощью QP для принудительного ограничения управляющего входа, которое индуцируется потенциальной барьерной функцией. Следующая лемма, представленная в более общей форме, чем в нашей предварительной работе Isaly et al. (2020) дает условия, при которых закон управления на основе КП с одним ограничением выполним и локально непрерывен по Липшицу. Решение КП в закрытой форме при отсутствии номинального регулятора (но с учетом нескольких управляющих входов) также было представлено Фрименом и Кокотовичем (19). 96, раздел 4.2.2) и был подробно разработан Xu et al. (2015), том. 8. В этих работах условие выполнимости гарантировалось допущением существования CLF или CBF соответственно. Поскольку добавление номинального регулятора является незначительным расширением доступной литературы, мы не приводим доказательство результата. Лемма 1 применима к законам управления, развитым в последующих разделах.
Лемма 1. Пусть функции a:Rn→R, b:Rn→R и unom:Rn→R локально липшицевы на Rn и удовлетворяют следующему условию допустимости:
az=0⇒bz<0.(6)
Тогда многозначное отображение Ū:Rn⇉R, определенное равенством Ūz≜u∈R:azu+bz≤0, непусто для всех z∈Rn и контроллер
u∗z≜arg minu∈Ru−unomz2s.t.azu+bz≤0(7)
локально липшицев на Rn, и для любой точки z ∗ такой, что az∗=0, существует окрестность Nz∗ такая, что u*z=unomz для всех z∈Nz*. Кроме того, контроллер в уравнении. 7 имеет решение в замкнутой форме:
u∗z=−bzazazunomz+bz>0unomzиначе. (8)
Обратите внимание, что в уравнении нет деления на ноль. 8, так как уравнение 6 подразумевает, что u*z=unomz, когда az=0. Заметим также, что утверждение о окрестности точек, для которых az*=0, вообще говоря, не выполняется, если выполняется неравенство в уравнении (1). 6 изменяется на bz≤0.
3.2 Схема управления двигателем
В этом разделе вход управления электродвигателем предназначен для обеспечения того, чтобы безопасный набор S={z∈R2:eL≤e≤eH} был UCAS для заданного z 2d > 0. Наша разработка основана на процедуре проектирования, описанной в Isaly et al. (2020) и теоретические результаты для гибридных систем в Maghenem and Sanfelice (2021) и Goebel et al. (2012), где Maghenem and Sanfelice (2021) конкретно рассматривают барьерные функции. Безопасный набор S кодируется кандидатом барьерной функции Be:R2→R, определенным как
Bez≜12Mz1e2βe−1(9)
где
βe≜eL2e≤0eh3e>0.
Эквивалентно исходному определению, мы имеем S={z∈R2:Bez≤0}. Барьерная функция спроектирована так, чтобы быть непрерывно дифференцируемой при кодировании потенциально асимметричной (около e = 0) границы множества S.
Хотя барьерные функции обычно связаны с прямой инвариантностью, они естественным образом расширяются для обеспечения более сильного свойства асимптотической устойчивости. . Асимптотическая устойчивость полезна для реальных приложений, поскольку гарантирует устойчивость к возмущениям из безопасного набора. Для систем с непрерывным временем более сильное условие асимптотической устойчивости воплощено в определении обнуляющей CBF (ZCBF) Xu et al. (2015). Вдохновленный подходом ZCBF в нашей предварительной работе Isaly et al. (2020) и в работе, посвященной CLF для гибридных систем в Санфеличе (2013), мы ограничиваем вход управления в соответствии с так называемой картой регулирования Ũ:R2⇉U, определяемой как
Ũz≜u∈U:∇Bez,f≤−γee,∀f∈Fuz,u,(10)
где усиление контроля. В анализе устойчивости в разделе 4 мы показываем, что выбор непрерывного регулятора из Ũ гарантирует, что B e действует как функция Ляпунова для замкнутой динамики вне множества S. В частности, условие в уравнении 10 будет использоваться для применения Предложения 3.27 Goebel et al. (2012), чтобы сделать вывод, что S, переопределенное для включения некоторых дополнительных состояний, является УГАС.
Замечание 2. Определение ZCBF требует, чтобы γez≜αBez для функции расширенного класса K a Xu et al. (2015). Однако требование зависимости γ e от кандидата барьерной функции может быть ограничительным и не является необходимым для получения теоретических гарантий. Поскольку значение функции M в B e неизвестно и не может быть реализовано в законе управления, мы используем γ e вместо типичного выбора на основе ZCBF при определении Ũ в уравнении. 10. Как для ZCBF, так и для выбора γ e в уравнении. 11, отображение в уравнении. 10 накладывает асимптотически стабилизирующие условия на барьерную функцию в состояниях вне безопасного множества.
Карта регулирования в уравнении. 10 не является непосредственно полезным для целей проектирования, потому что неопределенность в динамике препятствует вычислению неравенства (т. е. ограничения), используемого для определения Ũ. В оставшейся части этого раздела мы разработаем новую карту регулирования, основанную на вычислимом ограничении, реализуемом в QP, подобном уравнению. 7. Результирующий контроллер на основе QP является локально липшицевым выбором Ũ. Чтобы компенсировать неопределенность, введенную в уравнение. 10 по F u , мы используем основанные на Ляпунове методы робастного управления для построения верхней границы наихудшего случая скалярного произведения в уравнении. 10. Для любых z,u∈Cu и f∈Fuz,u
∇Bez,f∈12∇Mz1z2e2βe−1+1βeeτuz,u−τFz.(12)
Произведение 1βeeτFz содержит терм 1βeeVpzz2=1βeeVpze+ Vpzz2d, что приводит к сокращению на член 12∇Mz1z2e2βe, поскольку 12∇Mz1z2=Vpz. Используя свойства 2-7, можно показать, что неизвестные члены в уравнении. 12 ограничены сверху, для некоторых констант c 1 − c 3 , as
∇Bez,f≤Cee+1βeeτuz,u,(13)
для каждого z,u∈Cu и каждого f∈Fuz,u, где
Cee≜c1+c2e+c3e2.
В ур. 13, функция τ u зависит от входного сигнала управления двигателем u e и входного сигнала управления мышцами u M . Поскольку значение впоследствии разработанного входного сигнала управления мышцами будет скачком в дискретных случаях, желательно отделить входной сигнал двигателя от входного сигнала мышцы, чтобы обеспечить непрерывность контроллера двигателя. Непрерывный контроллер двигателя будет более предсказуемым и удобным для водителя. Используя свойство 8, существует константа c M > 0 такое, что
1βeeτuz,u=1βeeceue+τFESz,uM≤ceβeeue+cMe, (14)
для всех z∈R2, ue∈R и uM∈UM. Используя определение единой системы обмена сообщениями в разделе 2, уравнение. 14 применим к любому мышечному контроллеру, входы которого ограничены положительной константой ū. Затем можно определить
Kee≜k1+k2e+k3e2. (15)
Выбор 5
k1≥c1,k2≥c2+cM,k3≥c3, (16)
Cee+033 1βeeτuz,u≤Kee+ceβeeue(17)
для всех z∈R2, ue∈R и uM∈UM. Поскольку уравнение 17 является верхней границей уравнения. 13, мы определяем новую карту регулирования Ūe:R⇉R как
Ūee≜ue∈R:Kee+ceβeeue≤−γee.(18)
Следующий результат суммирует предыдущее развитие и объясняет полезность Ūe.
Предложение 1. Предположим, что k 1 , k 2 и k 3 удовлетворяют условиям усиления в уравнении. 16 и z 2d > 0. Тогда для любых z∈R2 и uM∈UM, если ue∈Ūee, следует ue,uM∈Ũz.
Ограничение, используемое для определения Ūe в уравнении. 18 можно записать в общей форме леммы 1. Кроме того, поскольку члены уравнения. 18 больше не являются неопределенными, ограничение может быть реализовано с помощью следующего реализуемого QP:
ue∗e≜arg minue∈Rue−uenome2s.t.Kee+ceβeeue≤−γee,(19)
где uenom:R→R — любой локально липшицевый номинальный регулятор. Согласно лемме 1, при bz=Kee+γee регулятор реализуем, если e = 0 подразумевает, что
Ke0+γe0=k1−kb1<0.(20)
20 выбираются пользователем, они могут быть спроектированы таким образом, чтобы соблюдалось неравенство. При таком условии усиления регулятор обладает свойствами, описанными в лемме 1, в частности, он непрерывен. Решение уравнения в закрытой форме. 19может быть разработан из уравнения. 8. Контроллер можно реализовать в любой форме, но решение в закрытой форме быстрее в вычислительном отношении и не требует пакета оптимизации. Заметим, что кусочно-линейная функция e↦ce/βee локально липшицева, из чего следует локальная липшицевость регулятора.
Замечание 3. В ходе экспериментов в разделе 5 мы исследовали постоянные номинальные регуляторы uenom≜u0 для некоторого u0∈R. Когда u 0 = 0, контроллер является контроллером минимальной нормы, и двигатель отключается, когда это возможно, при этом обеспечивая безопасность. Когда водителю требуется дополнительная помощь, выбор положительного u 0 приводит к смещению мотора на помощь, а отрицательное значение u 0 приводит к дополнительному сопротивлению и более сложной программе тренировок. Однако нет теоретических препятствий для использования более сложного номинального контроллера (например, такого, который отслеживает мощность).
3.3 Функциональная схема электростимуляции
Для описания управляющего входа ФЭС определим каскадный вектор состояния x≜z,σM,τ∈X, где σM∈0,16 — вектор сигналов переключения σm∈0,1, определенный для каждой мышцы m∈M, τ∈R — переменная таймера, а X≜R2×0,16×R — пространство состояний. Ввод стимуляции групп мышц всадника uM*:X→R6 определяется для каждой мышцы как 6
um∗x≜satū+σmuFES∗e,(21)
где uFES∗:R→R будет определено позже. Сигналы переключения обновляются при прыжках по правилу
σm+=1z1∈Qm0z1∉Qm,(22)
, где Qm определено в разделе 2. Правило обновления указывает, что мышцы всадника стимулируются в областях, где они могут для создания положительного крутящего момента. Правило для σ m и переменная таймера τ будут использоваться для определения гибридной системы в разделе 4. :e≥eFES}, потому что вход стимуляции um∗ ограничен по величине и доступен только с перерывами. Функция uFES∗ в уравнении 21 представляет выбор входа, который сделал бы набор SFES асимптотически устойчивым в отсутствие этих препятствий (и с учетом некоторых условий усиления). Разработка uFES* очень похожа на ту, что описана в разделе 3.2, и поэтому опущена во избежание избыточности. Более того, мы не претендуем на предстоящий анализ стабильности в отношении SFES. Вход FES определяется следующим QP:
uFES∗e≜arg minuFES∈RuFES−uFESnomes.t.KFESe+1β2eeuFES≤−γFESe. (23)
где uFESnom:R→R — любой локально липшицевый номинальный регулятор,
KFESe≜k4+k5e+k6e2,
γFESe≜kb2e2β2e−1,
и
β2e≜eFES2e≤0eh3e>0.
При e = 0 условие допустимости (6) в лемме 1 требует, чтобы
KFES0+γFES0=k4−kb2<0,(24)
, при котором функция uFES∗ обладает описанными в лемме свойствами. Как и в предыдущем разделе, параметры в уравнении. 24 выбираются пользователем и могут быть спроектированы таким образом, чтобы соблюдалось неравенство.
Когда номинальный регулятор в уравнении. 23 установлено значение uFESnom≜0, тогда из решения в замкнутой форме в уравнении. 8 можно определить, что uFES∗e≤0 для всех e ≥ 0. В этом случае из-за использования функции насыщения в уравнении. 21 следует, что um*x=0 для всех x∈X, таких что e ≥ 0. Включение номинального регулятора в QP, определяющую uFES*, дает оператору гибкость для обеспечения стимуляции в точках, где e ≥ 0. При использовании номинальный контроллер с uFESnome>0 для e ≥ 0, стимуляция FES создает крутящий момент для увеличения частоты педалирования выше заданного значения z 2д . Однако всегда так, что uFES*e→0 при e → e H . Комбинируя номинальную помощь от FES с номинальным сопротивлением электродвигателя, можно разработать более интенсивную программу тренировок, в которой гонщик должен работать против крутящего момента сопротивления электродвигателя, чтобы оставаться вблизи заданного значения. В разделе 5 мы приводим экспериментальные результаты для конфигурации системы управления с более высокой интенсивностью. σM,τ∈X, где пространство состояний X было определено в разделе 3.3. Гибридная система будет периодически обновлять сигналы переключения мышц σ м по правилу в уравнении. 22. Переменная таймера τ увеличивается с постоянной скоростью до достижения времени задержки τ D > 0, после чего происходит скачок, и каждый сигнал в σ M обновляется. Управление переходами с помощью времени задержки предотвращает возникновение нескольких переходов в один и тот же момент времени и моделирует вычислительную реализацию сигналов переключения, в которой значения логических переменных будут периодически обновляться с фиксированной частотой дискретизации. На практике время выдержки τ D будет частотой дискретизации.
Гибридная система H определяется следующим образом. Карта потока F:X⇉X равна
żσ̇Mτ̇∈Fuz,u∗x01≜Fx,
, где u∗x≜ue∗e,uM∗x и F u определено в уравнении. 2. Множество потоков
C≜x∈X:τ∈0,τD.
Скачки происходят, когда состояние таймера τ увеличивается до τ D ,
D≜x∈X:τ=τD.
Карта скачков G:X⇉X определяется покомпонентно как Gx≜z,Gσx,0, где состояние z не меняется при скачках (z + = z), таймер τ обнуляется при скачках (τ + = 0), а Gσ:X⇉0,16 — внешняя полунепрерывная регуляризация по Красовскому отображения в уравнении (1). 22 Гебель и др. (2012), деф. 4.13. Для каждого m∈M соответствующая компонента G σ равна
Gσmx=1z1∈Qm0,1z1∈∂Qm0 в противном случае. (25)
Многозначный случай в уравнении 25 показывает, что если τ достигает τ D , когда состояние z 1 находится точно на границе Qm, сигнал σ m может или не может быть скачком. Выполнение такой регуляризации приводит к некоторым свойствам устойчивости из-за того, что H является корректной гибридной системой Goebel et al. (2012, гл. 6).
Замечание 4. Условия усиления в уравнениях. 20, 24 должны быть удовлетворены, потому что они приводят к осуществимости контроллеров на основе QP. Условия переформулированы здесь для акцента:
k1 Теорема 1. Рассмотрим замкнутую систему цикл-наездник H. Предположим, что усиление управления удовлетворяет условиям в уравнениях. 16, 20, 24 и z 2d > 0. Тогда безопасное множество S̃≜x∈C∪D:eL≤e≤eH является УГАС для H. Доказательство. Начиная с В e в уравнении. 9 такова, что S̃=x∈C∪D:Bez≤0, функция B e является действительным кандидатом барьерной функции Maghenem and Sanfelice (2021), Def. 3. Используя лемму 1, условия усиления в уравнениях. 20, 24 гарантируют, что контроллеры в уравнениях. 19, 21 соответственно. По замыслу ue*e∈Ūee для всех e∈R и um*x∈UM для всех x∈X. Затем предложение 1 показывает, что u*x∈Ũz для всех x∈X. Из определения Ũ в уравнении 10, что ∇Bez,f≤−γee, (26) для всех x ∈ C и каждого f∈Fx. Более того, карта прыжков такова, что Bez+=Bez,(27) для всех x ∈ D и каждого z+,σM+,τ+∈Gx. Барьерная функция не уменьшается на скачках, но имеется достаточное время истечения, чтобы гарантировать общее уменьшение вдоль решений. Более конкретно, время пребывания τ D гарантирует, что для любого решения ϕ для H, если t,j∈domϕ, то t≥τDj−1. Условия в уравнениях. 26, 27, а также тот факт, что Gx⊂C∪D для всех x ∈ D, позволяют нам применить теорему 1 Магенема и Санфеличе (2021) и заключить, что множество S̃ является преинвариантным вперед для H. Кроме того, барьерная функция Б e — функция Ляпунова для ограниченной гибридной системы Hr=Cr,F,Dr,G с Cr≜C∩I и Dr≜D∩I, где I≜x∈X:Bez≥0, которая является ограничением H на нулевой набор суперуровней B e . Можно показать, что существует 7 непрерывная положительно определенная функция ρ:R≥0→R≥0 такая, что ρxS̃≤γee для всех x ∈ C r . Используя свойство 1, существуют функции класса K∞ 8 α 1 и α 2 такие, что α1xS̃≤Bz≤α2xS̃ для всех x∈Cr∪Dr∪GDr. Таким образом, предложение 3.27 Goebel et al. (2012) можно применить, чтобы сделать вывод, что S̃ является равномерно глобально предасимптотически устойчивым (UGpAS) для HrGoebel et al. Чтобы заключить, что S̃ есть UGAS 9 , осталось показать, что каждое максимальное решение H полно. С этой целью мы используем предложение 6.10 Goebel et al. (2012). Прежде всего отметим, что динамика удовлетворяет гибридным базовым условиям Goebel et al. (2012), Асм. 6.5, так как C и D замкнуты; G внешне полунепрерывна и локально ограничена; и F полунепрерывна снаружи, локально ограничена и выпуклозначна по свойству 9 и лемме 3.2 в Sanfelice (2013). Отсюда следует, что H является корректной гибридной системой Goebel et al. (2012), том. 6.30. Далее, каждая точка x ∈ ∂C\D имеет компоненту τ = 0. Тот факт, что τ̇=1, означает, что Fx∩TCx≠∅ в любой точке x ∈ ∂C\D, где TCx — касательный конус к C в точке x. Чтобы исключить возможность того, что максимальные решения ускользают за конечное время путем перетекания, сначала пусть ϕ будет решением H. Из определения UGpAS в определении 3.6 Goebel et al. (2012), расстояние ϕ от S̃ ограничено. По определению S̃ компонента ϕ, соответствующая состоянию e, ограничена. Используя эту информацию, мы заключаем из непрерывности e↦ue*e и использования функции насыщения в определении uM* в уравнении. 21 видно, что для каскадного регулятора u* множество u*rgeϕ ограничено, где rgeϕ≜{ϕt,j:t,j∈domϕ}. Тогда из ограниченности e-компоненты ϕ и свойств 2-7 можно показать, что множество Frgeϕ ограничено. Отсюда следует, что решения не заканчиваются течением за конечное время (см. Камалапуркар и др. (2020)). Таким образом, каждое максимальное решение H является полным, и S̃ является УГАС для H. Разработанный контроллер барьерной функции был протестирован на пяти участниках и сравнивался с неконтролируемым волевым вращением педалей и 3-режимным (3M) контроллером, разработанным Rouse et al. (2020), Раздел 3. Как описано в Разделе 1, основная идея контроллера 3M заключается в создании области вблизи заданного значения z 2d , где никакая помощь не предоставляется, с прерывистым усилием управления, прилагаемым к границе области. . В отличие от контроллера барьерной функции, контроллер электродвигателя для контроллера 3M связан со стимуляцией ФЭС через состояние углового положения z 1 , так что двигатель неактивен, когда активен FES, и наоборот. Контроллер функции шлагбаума можно настроить для различных целей в зависимости от потребностей водителя. Как правило, существует компромисс, когда меньшие определяемые пользователем диапазоны частоты вращения педалей приводят к большему приложенному усилию управления. В связи с трудностями, связанными с COVID-19, при составлении расписания участников с неврологическими заболеваниями, испытания для этой демонстрации проводились на здоровых субъектах. Каждый участник дал письменное информированное согласие, одобренное Институциональным наблюдательным советом Университета Флориды (IRB201600881). Экспериментальный испытательный стенд состоял из стационарного лежачего трехколесного велосипеда (TerraTrike Rover) с двигателем мощностью 250 Вт, 24 В (Unite Motor Co.), соединенным с приводной цепью, как описано в Bellman et al. (2017), раздел 5.1. Для измерения положения и частоты вращения педалей к кривошипу с помощью прямозубых шестерен был прикреплен оптический энкодер с угловым разрешением 20 000 импульсов на оборот (US Digital h2). Двигатель приводился в действие с помощью Advanced Motion Controls 9.0151 10 Драйвер двигателя и блок питания с регулируемым током. Стимуляция четырехглавой мышцы бедра, подколенного сухожилия и ягодичных мышц всадника осуществлялась с помощью самоклеящихся электродов, предоставленных компанией Axelgaard Manufacturing Co., Ltd. Стимулятор с регулируемым током (Hasomed Rehastim) доставлял симметричные, прямоугольные и двухфазные импульсы с фиксированной частотой. Первичная процедура тестирования (Протокол A) состояла из 180-секундных тестов для каждой из трех рассматриваемых конфигураций (барьерная функция, 3M и только воля). Проба произвольного вращения педалей всегда была первой, за которой следовал случайный выбор либо барьерной функции, либо контроллера 3M. Гонщикам было предложено отслеживать заданное значение z 2d = 50 об/мин. 180-секундные тесты начались с 20-секундной фазы разгона, когда гонщик сидел пассивно, пока мотор доводил частоту вращения педалей до заданного значения. Чтобы гарантировать, что представленные данные представляют собой работу в установившемся режиме, разгон и дополнительные 20 секунд после него были исключены из каждого набора данных при постобработке. Для каждой конфигурации перед записанным сеансом проводилась отдельная разминка, чтобы гонщик мог привыкнуть к контроллеру. Измерения положения ног всадника по отношению к циклу использовались для определения областей эффективной передачи крутящего момента Qm для каждой мышцы (подробнее см. Bellman et al. (2017), Раздел 5.2). Первоначально цикл выполнялся при 50 об/мин, и стимуляция без обратной связи применялась к одной группе мышц за раз, чтобы определить предел комфорта ū для каждой мышцы. Входы FES масштабируются порогом комфорта в дополнение к насыщению 12 . Номинальные контроллеры были uenom=uFESnom=0. Усиления контроля были скорректированы путем построения контрольных входных данных в зависимости от ошибки частоты вращения педалей, что дало визуализацию областей приложенного управляющего усилия. Небольшие корректировки результатов были сделаны для каждого участника в зависимости от его предпочтений во время разминки, что является причиной различий в данных между участниками. Некоторое подробное обсуждение влияния усиления контроллера барьерной функции на производительность представлено в Isaly et al. Были проведены дополнительные испытания, чтобы выявить уникальные аспекты контроллера барьерной функции, которые проводились только с одним участником. Протокол B был разработан для того, чтобы отдавать предпочтение выходной мощности гонщика, а не отслеживанию частоты вращения педалей. Для этого альтернативного испытания ширина безопасного диапазона была больше: e L = -12 об/мин, e H = 10 об/мин и e FES = -6 об/мин. Поскольку гонщик (участник № 2) был работоспособен, мы решили усложнить программу, добавив номинальные контроллеры с uenom<0 и uFESnom>0, что означает, что вблизи заданного значения электродвигатель создавал резистивный крутящий момент, а FES помогал. . Границы e L и e H отображались на экране для этого испытания. В протоколе C участника № 1 просили не прилагать никаких усилий как для контроллера 3M, так и для контроллера барьерной функции (рис. 4). Из-за проблем с контроллером 3M для этого испытания мы не приступили к тестированию конфигурации без волеизъявления на других участниках. В таблице 1 приведены соответствующие статистические данные для трех конфигураций, протестированных для протокола A, включая среднее значение и стандартное отклонение частоты вращения педалей, процент продолжительности испытания, в течение которого ФЭС активно стимулировал, и время, проведенное за пределами безопасного набора S. Даны два интеграла входной мощности электродвигателя, чтобы различать крутящий момент сопротивления, для компенсации которого гонщик должен сильнее крутить педали, и вспомогательный крутящий момент, который подразумевает работу, выполняемую двигателем, а не гонщиком. Контроллер барьерной функции давал наименьшее стандартное отклонение каденса для каждого участника и приводил к большему использованию FES, но обычно использовал больший вспомогательный крутящий момент от двигателя, чем контроллер 3M. Контроллер 3M создавал меньший вспомогательный крутящий момент, потому что электродвигатель отключался в тех областях цикла запуска, где была активна FES. ТАБЛИЦА 1 . Протокол A: Циклические показатели во время работы в установившемся режиме (140-секундное испытание). РИСУНОК 2 . Ввод частоты вращения педалей и управления двигателем для 30-секундных сегментов испытаний с использованием Протокола А. Для выбора участников и периодов времени использовался случайный выбор. Ось времени смещена к нулю для удобочитаемости. Пунктирная оранжевая линия на графике каденции барьерной функции указывает на границу безопасного набора S, который не имел значения для двух других конфигураций. РИСУНОК 3 . Увеличенное изображение 5-секундного периода времени во время испытания с использованием протокола A, показывающее частоту вращения педалей, ввод управления двигателем и ширину импульса стимуляции (PW) для участника 5. Для выбора участника и периода времени был использован случайный выбор. Ось времени смещена к нулю для удобочитаемости. Для облегчения стимуляции использовался упреждающий член длительностью импульса 10 мкс. Стимуляция существенно не влияет на участника на уровне 10 мкс или ниже. На рис. РИСУНОК 4 . Каденция из испытания с использованием Протокола C, где Участника № 1 попросили не прилагать никаких волевых усилий. В этом сценарии с контроллером 3M возникли проблемы из-за переключения между FES и управлением двигателем. Заштрихованные красные области на графике 3-Mode соответствуют времени, когда электродвигатель был выключен. Результаты для протокола B, где были ненулевые номинальные контроллеры и более широкий безопасный диапазон, показаны на Рис. РИСУНОК 5 . Сегмент испытания с использованием протокола B, где использовались альтернативные параметры для контроллера барьерной функции. ТАБЛИЦА 2 . Протокол B – контроллер функции барьера: Циклические показатели во время работы в установившемся режиме (испытание в течение 140 секунд). Результаты для Протокола А демонстрируют, что контроллер барьерной функции может помочь гонщику отслеживать заданное значение частоты вращения педалей, ограничивая частоту вращения педалей в заданном пользователем диапазоне. На рисунке 3 показано, что управляющие входы увеличиваются до того, как частота шагов достигает границ, определенных e H , e L и e FES , но они неактивны, когда частота шагов приближается к заданному значению. Такое нарастание демонстрирует, как методы барьерных функций могут обеспечить постепенный переход от номинального регулятора, который должен быть активен внутри безопасного множества, к обеспечивающему инвариантность регулятору на границе безопасного множества. В некоторых ситуациях увеличение интенсивности тренировок для всадника предпочтительнее улучшения отслеживания частоты вращения педалей. Соответствующие статистические данные представляют собой вспомогательный и резистивный крутящие моменты, создаваемые электродвигателем. Более высокий вспомогательный крутящий момент указывает на то, что водитель производит меньше энергии. Контроллер функции шлагбаума является универсальным и может быть настроен таким образом, чтобы в большей или меньшей степени возникали помехи от управляющих входов. На рисунке 5 показано испытание с использованием протокола B, в котором выходная мощность гонщика была приоритетной, допуская большие ошибки частоты вращения педалей. Оператор системы может допустить большие ошибки частоты вращения педалей, выбрав более широкий безопасный диапазон, что также облегчает проектирование более широкого номинального диапазона управления. Непрерывный контроллер двигателя более удобен для водителя. Непрерывность является основным отличием барьерной функции от контроллера 3M. Были небольшие отклонения от безопасного набора, поскольку асимптотическая устойчивость S зависит от выбора коэффициента усиления управления, который должен быть достаточно большим, чтобы компенсировать волевое усилие всадника и другие динамические эффекты. В этом документе были разработаны новые FES и контроллеры двигателя, которые побуждают гонщика при стационарном цикле прилагать волевое усилие, ограничивая частоту вращения педалей в заданном пользователем диапазоне. Экспериментальные результаты показали, что система управления улучшила отслеживание частоты вращения педалей гонщика и эффективно ограничивала их частоту педалирования в пределах безопасного набора. Необработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без неоправданных оговорок. Исследования с участием людей были проверены и одобрены Институциональным наблюдательным советом Университета Флориды (IRB201600881). Пациенты/участники предоставили письменное информированное согласие на участие в этом исследовании. ИИ разработал контроллер и эксперимент, написал рукопись и обработал результаты экспериментов. Это исследование частично поддерживается премией AFOSR №. FA9550-19-1-0169, награда №. FA9550-19-1-0053 и наградной номер. ФА9550-20-1-0238; наградой NSF №. ECS-1710621, награда №. CNS-1544396, награда №. CNS-2039054 и номер награды. 1762829; и Армейским исследовательским бюро по гранту №. W911NF-20-1-0253. Любые мнения, выводы и заключения или рекомендации, выраженные в этом материале, принадлежат автору (авторам) и не обязательно отражают точку зрения спонсирующего агентства. Редактор обработки заявил о прошлом соавторстве с одним из авторов WD. Остальные авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов. Все утверждения, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов. Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем. 1 Для векторов x∈Rn, y∈Rm, x,y≜xT,yTT. 2 Сложение точки a∈R и множества B⊂R определяется как a+B≜a+b:b∈B. 3 Используя преобразование в уравнении. 5 мы часто используем e вместо состояния каденции z 2 . 4 Набор, являющийся UCAS, также инвариантен вперед, что означает, что траектории, начинающиеся внутри набора, остаются в наборе все время. 5 Хотя условия усиления в уравнении. 16 потребуется, чтобы гарантировать, что такт ограничен набором S, равномерная глобальная асимптотическая устойчивость гарантирует, что такт остается близким к S, даже если условия не выполняются (см. 6 Положительная функция насыщения satū+:R→R определяется как satū+u=0, если u < 0, satū+u=u, если u∈0,ū, и satū+u=ū, если u>ū . 7 Хотя можно разработать и более общие методы, здесь достаточно определить ρs≜γes+eH, если eH≥eL, или ρs≜γeeL−s, если eH 8 Функция α:R≥0→R≥0 является функцией класса K∞, если a равна нулю в нуле, непрерывна, строго возрастает и неограничена. 9 Набор A является UGAS для гибридной системы H, если он является UGpAS и каждое максимальное решение системы является полным, то есть решение определено в неограниченной гибридной временной области. 10 Компания Advanced Motion Controls поддержала разработку испытательного стенда, предоставив скидки на свои фирменные товары. 11 В контроллере 3M пользователь определяет область, в которой управление не применяется. Асимптотически стабильная область будет вызвана выбором усиления управления, но невозможно вычислить эту область явно. 12 Практические усовершенствования, такие как увеличение контроля над мышцами, не включены в теоретическую разработку для простоты. Эймс, А. Д., Куган, С., Эгерстедт, М., Нотомиста, Г., Шринат, К., и Табуада, П. (2019). «Барьерные функции управления: теория и приложения», в Proc. Евро. Конф. управления (IEEE), 3420–3431. doi:10.23919/ecc.2019.8796030 Полный текст CrossRef | Google Scholar Эймс, А. Д., Сюй, X., Гриззл, Дж. В., и Табуада, П. (2016). Квадратичные программы на основе функции барьера управления для систем, критически важных с точки зрения безопасности. IEEE Trans. Автоматическое управление. 62, 3861–3876. Google Scholar Асл, Х. Дж., Ямасита, М., Нарикиё, Т., и Каваниши, М. Полный текст CrossRef | Google Scholar Беллман, М. Дж., Дауни, Р. Дж., Парих, А., и Диксон, В. Е. (2017). Автоматический контроль цикличности, вызванный функциональной электрической стимуляцией с помощью электродвигателя. IEEE Trans. Автомат. науч. англ. 14, 1225–1234. doi:10.1109/TASE.2016.2527716 Полный текст CrossRef | Google Scholar Кай, К., и Тил, А. Р. (2009). Характеристики устойчивости входа к состоянию для гибридных систем. Сист. Контроль. лат. 58, 47–53. doi:10.1016/j.sysconle.2008.07.009 Полный текст CrossRef | Google Scholar Кузен, К. А., Дуэнас, В. Х., Роуз, К. А., Беллман, М. Дж., Фриборн, П., Фокс, Э. Дж., и др. (2020). Каденция с обратной связью и мгновенное управление мощностью в цикле моторизованной функциональной электрической стимуляции. Полный текст CrossRef | Google Scholar Дао, К.-Т., и Ямамото, С.-и. (2018). Помощь по мере необходимости Управление роботизированным ортезом, приводимым в действие пневматической искусственной мышцей, для реабилитации походки. Заяв. науч. 8, 499. doi:10.3390/app8040499 CrossRef Full Text | Google Scholar Дин Б., Ай К., Лю К. и Мэн В. (2014). «Управление траекторией реабилитационного робота с использованием виртуального туннеля и адаптивного контроллера импеданса», Седьмой международный симпозиум по вычислительному интеллекту и дизайну (IEEE), 2014 г., 158–161. Дои: 10.1109/iscid.2014.204 Полный текст CrossRef | Google Scholar Дуэнас, В. Х., Кузин, К. А., Роуз, К., Фокс, Э. Дж., и Диксон, У. Э. (2020). Распределенное повторяющееся управление обучением для совместного отслеживания частоты вращения педалей при функциональной электрической стимуляции на велосипеде. PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar Ферранте С., Педрокки А., Ферриньо Г. и Молтени Ф. (2008). Езда на велосипеде, вызванная функциональной электрической стимуляцией, улучшает мышечную силу и двигательный контроль у людей, перенесших острый инсульт. Лауреат премии Europa Medicophysica-SIMFER 2007. евро. Дж. Физ. Реабилит. Мед. 44, 159–167. Реферат PubMed | Google Scholar Фриман, Р. А., и Кокотович, П. В. (1996). Моделирование робастного нелинейного управления: пространство состояний и методы Ляпунова . Бостон, Массачусетс: Биркхойзер. Google Scholar Глотфельтер П., Кортес Дж. и Эгерштедт М. (2017). Негладкие барьерные функции с приложениями к системам с несколькими роботами. Управление IEEE. Сист. лат. 1, 310–315. Дои: 10.1109/lcsys.2017.2710943 Полнотекстовая перекрестная ссылка | Google Scholar Гебель Р. Google Scholar Harrington, A.T., McRae, C.G.A., and Lee, SCK (2012). Оценка функциональной электрической стимуляции для помощи при езде на велосипеде у четырех подростков со спастическим церебральным параличом. Междунар. Дж. Педиатр. 2012, 1–11. doi:10.1155/2012/504387 Полный текст CrossRef | Академия Google Хукер, С.П., Фигони, С.Ф., Роджерс, М.М., Глейзер, Р.М., Мэтьюз, Т., Сурьяпрасад, А.Г., и соавт. (1992). Физиологические эффекты электростимуляции цикла упражнений для ног у лиц с травмой спинного мозга. Арх. физ. Мед. Реабилит. 73, 470–476. Реферат PubMed | Google Scholar Идсё, Э.С. (2002). Разработка математической модели системы «райдер-трехколесный велосипед» . Тронхейм: Норвежский университет науки и технологий. Google Scholar Исали А., Аллен Б. К., Санфеличе Р. CrossRef Полный текст | Google Scholar Янссен Т. В., Белтман Дж. М., Элич П., Коппе П. А., Конийненбельт Х., де Хаан А. и др. (2008). Эффекты обучения езде на велосипеде с электростимуляцией у людей с хроническим инсультом. Арх. физ. Мед. Реабилит. 89, 463–469. doi:10.1016/j.apmr.2007.09.028 PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar Джонстон, Т. Е., Смит, Б. Т., Оладеджи, О., Бетц, Р. Р., и Лауэр, Р. Т. (2008). Результаты домашней программы езды на велосипеде с использованием функциональной электрической стимуляции или пассивного движения для детей с травмой спинного мозга: серия случаев. J. Медицина спинного мозга. 31, 215–221. doi:10.1080/107 .2008.11760715 CrossRef Full Text | Академия Google Джонстон, Т. PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar Камалапуркар Р., Диксон У. Э. и Тил А. (2020). О редукции дифференциальных включений и устойчивости по Ляпунову. Эсаим: управление оптим. Расчет 26, 1–16. doi:10.1051/cocv/2019074 Полнотекстовая перекрестная ссылка | Google Scholar Маккей-Лайонс, М.Дж., и Макридес, Л. (2002). Сердечно-сосудистый стресс во время современной программы реабилитации после инсульта: достаточна ли интенсивность, чтобы вызвать тренировочный эффект? Арх. физ. Мед. Реабилит. 83, 1378–1383. doi:10.1053/apmr.2002.35089 PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar Магенем М. и Санфеличе Р. Г. (2021). Достаточные условия прямой инвариантности и сжимаемости в гибридных включениях с использованием барьерных функций. CrossRef Полный текст | Google Scholar Мор Т., Поденфант Дж., Биринг-Соренсен Ф., Гальбо Х., Тамсборг Г. и Кьер М. (1997). Увеличение минеральной плотности костной ткани после длительной электроиндуцированной циклической тренировки парализованных конечностей у человека с травмой спинного мозга. Кальцин. Ткань внутр. 61, 22–25. doi:10.1007/s002239 6 PubMed Abstract | Полный текст перекрестной ссылки | Академия Google Ouellette, M.M., LeBrasseur, N.K., Bean, J.F., Phillips, E., Stein, J., Frontera, W.R., et al. (2004). Высокоинтенсивные тренировки с отягощениями улучшают мышечную силу, самооценку функций и инвалидность у выживших после инсульта. Инсульт 35, 1404–1409. doi:10.1161/01.str.0000127785.73065.34 PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar Пехливан, А. У., Лоузи, Д. П., и О’Мэлли, М. К. (2015). Минимальный контроллер помощи при необходимости для роботизированной реабилитации верхних конечностей. PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar Роуз, К., Кузен, К.А., Аллен, Б.К., и Диксон, В.Е. (2021). Совместное управление переключаемой моторизованной ездой на велосипеде FES в цикле Split-Crank с учетом насыщения входа управления мышцами. Автоматика 123, 1–11. doi:10.1016/j.automatica.2020.109294 CrossRef Full Text | Google Scholar Санфеличе, Р. Г. (2013). О существовании управляющих функций Ляпунова и законов обратной связи по состояниям для гибридных систем. IEEE Trans. Автомат. контр. 58, 3242–3248. doi:10.1109/tac.2013.2264851 Полный текст CrossRef | Google Scholar Тревизи Э., Гуальди С., Де Конти К., Сальгетти А., Мартинуцци А., Педрокки А. Google Scholar Сюй X., Табуада П., Гриззл Дж. В. и Эймс А. Д. (2015). Надежность функций контрольного барьера для критически важного для безопасности контроля** Эта работа частично поддерживается грантами Национального научного фонда 1239055, 1239037 и 1239085. IFAC-PapersOnLine 48, 54–61. doi:10.1016/j.ifacol.2015.11.152 Полный текст CrossRef | Google Scholar журнальная статья Мерри Буллок и Пауль Люткенхаус Развитие ребенка Том. 59, № 3 (июнь 1988 г.), стр. 664–674 (11 страниц) Опубликовано: Wiley https://www. Прочитать и загрузить Войти через школу или библиотеку Альтернативные варианты доступа Для независимых исследователей Читать онлайн Читать 100 статей в месяц бесплатно Подписаться на JPASS Неограниченное чтение + 10 загрузок Артикул для покупки 34,00 $ — Загрузить сейчас и позже С помощью личного аккаунта вы можете читать до 100 статей каждый месяц за бесплатных . Уже есть учетная запись? Войти Купите эту статью за 34,00 долларов США. Предварительный просмотр Предварительный просмотр Для описания ранних волевых навыков были изучены способности детей ясельного возраста приводить свою деятельность в соответствие с внешними стандартами задач, а также отслеживать и контролировать деятельность в отношении результатов. Наблюдали за детьми в возрасте от 15 до 35 месяцев, когда они участвовали в ряде игр и заданий по уборке. Результаты показали, что существует последовательная модель развития в отношении того, в какой степени дети сосредотачиваются на достижении результатов (а не в действиях ради самих действий), в какой степени они контролируют, корректируют и контролируют действия, а также в частоте, с которой они реагируют на их результаты положительно. Как флагманский журнал Общества исследований в области развития ребенка, развитие ребенка публикует статьи, эссе, обзоры и учебные пособия по различным темам в области детского развития с 1930 года. Охватывая многие дисциплины, журнал предоставляет последние исследования не только для исследователей и теоретиков, но и для детских психиатров, клинических психологов, психиатрических социальных работников, специалистов по дошкольному воспитанию, педагогов-психологов, педагогов специального образования и других исследователей. Wiley — глобальный поставщик контента и решений для рабочих процессов на основе контента в областях научных, технических, медицинских и научных исследований; профессиональное развитие; и образование. Наши основные виды деятельности выпускают научные, технические, медицинские и научные журналы, справочники, книги, услуги баз данных и рекламу; профессиональные книги, продукты по подписке, услуги по сертификации и обучению, а также онлайн-приложения; а также образовательный контент и услуги, включая интегрированные онлайн-ресурсы для преподавания и обучения для студентов, аспирантов и учащихся на протяжении всей жизни. Этот предмет является частью коллекции JSTOR. Фильтр поиска панели навигации
Oxford AcademicАгентство и ответственность: избранные эссеМетафизикаМоральная философияФилософия действияФилософия разумаСоциальная и политическая философияКнигиЖурналы
Термин поиска мобильного микросайта Закрыть Фильтр поиска панели навигации
Oxford AcademicАгентство и ответственность: избранные эссеМетафизикаМоральная философияФилософия действияФилософия разумаСоциальная и политическая философияКнигиЖурналы
Термин поиска на микросайте Расширенный поиск Иконка Цитировать Цитировать Разрешения Watson, Gary, ‘волевые потребности’ , Агентство и ответственность: отобранные очерки ( Oxford, 2004; онлайн Edn, Academan , 100009 EDN, , 1000 3 , , 10003 , , 10003 . ), https://doi.org/10.1093/acprof:oso/9780199272273.003.0005, , по состоянию на 17 сентября 2022 г. Выберите формат
Выберите format.ris (Mendeley, Papers, Zotero).enw (EndNote).bibtex (BibTex).txt (Medlars, RefWorks) Закрыть Фильтр поиска панели навигации
Oxford AcademicАгентство и ответственность: избранные эссеМетафизикаМоральная философияФилософия действияФилософия разумаСоциальная и политическая философияКнигиЖурналы
Термин поиска мобильного микросайта Закрыть Фильтр поиска панели навигации
Oxford AcademicАгентство и ответственность: избранные эссеМетафизикаМоральная философияФилософия действияФилософия разумаСоциальная и политическая философияКнигиЖурналы
Термин поиска на микросайте Advanced Search Гарри Франкфурт и Бернард Уильямс утверждали, что наша честность как агентов зависит от формы добровольной недееспособности. Ключевые слова:
волевая необходимость, Франкфурт, Вильямс, обдумывание, воля, решение, целостность, одобрение, забота, желание Тема Философия действияСоциальная и политическая философияМоральная философияМетафизикаФилософия разума В настоящее время у вас нет доступа к этой главе. Получить помощь с доступом Доступ к контенту в Oxford Academic часто предоставляется посредством институциональных подписок и покупок. Как правило, доступ предоставляется через институциональную сеть к диапазону IP-адресов. Эта аутентификация происходит автоматически, и невозможно выйти из учетной записи с IP-аутентификацией. Выберите этот вариант, чтобы получить удаленный доступ за пределами вашего учреждения. Технология Shibboleth/Open Athens используется для обеспечения единого входа между веб-сайтом вашего учебного заведения и Oxford Academic. Если вашего учреждения нет в списке или вы не можете войти на веб-сайт своего учреждения, обратитесь к своему библиотекарю или администратору. Введите номер своего читательского билета, чтобы войти в систему. Если вы не можете войти в систему, обратитесь к своему библиотекарю. Доступ члена общества к журналу достигается одним из следующих способов: Многие общества предлагают единый вход между веб-сайтом общества и Oxford Academic. Если вы видите «Войти через сайт сообщества» на панели входа в журнале: Если у вас нет учетной записи сообщества или вы забыли свое имя пользователя или пароль, обратитесь в свое общество. Некоторые общества используют личные аккаунты Oxford Academic для предоставления доступа своим членам. Смотри ниже. Личную учетную запись можно использовать для получения оповещений по электронной почте, сохранения результатов поиска, покупки контента и активации подписок. Некоторые общества используют личные аккаунты Oxford Academic для предоставления доступа своим членам. Щелкните значок учетной записи в правом верхнем углу, чтобы: Oxford Academic предлагает широкий ассортимент продукции. Подписка учреждения может не распространяться на контент, к которому вы пытаетесь получить доступ. Если вы считаете, что у вас должен быть доступ к этому контенту, обратитесь к своему библиотекарю. Для библиотекарей и администраторов ваша личная учетная запись также предоставляет доступ к управлению институциональной учетной записью. Здесь вы найдете параметры для просмотра и активации подписок, управления институциональными настройками и параметрами доступа, доступа к статистике использования и т. д. Наши книги можно приобрести по подписке или приобрести в библиотеках и учреждениях. Информация о покупке View via Publisher Psychology Мы разработали поддержку волевого контроля с четырьмя этапами для инициации цели («Хочу этого»), формирования цели («Планируй это»), контроля действия («Сделай это») и контроля эмоций (« Заканчивай») на основе… Психология саморегулируемые учебные заведения социально-когнитивный каркас и включают когнитивный, метакогнитивный и мотивационный компоненты. Образование исследование и практика. В нем описывается, как… Психология Цели этого исследования состояли в том, чтобы исследовать (а) влияние поддержки воли (VoS) на мотивацию студентов, регулирование усилий и производительность, а также (б) восприятие студентов о… Психология Модели саморегулируемого обучения подчеркивают, что учащиеся более эффективны, когда они мотивированы на самостоятельное обучение. Биология, психология Психология Саморегулируемое обучение (SRL) вызывает все больший интерес в исследованиях в области образования. Хотя модели SRL соглашаются с динамическим взаимодействием между предусмотрительностью, производительностью и саморефлексией… Способность откладывать краткосрочное удовлетворение для достижения ценных долгосрочных целей имеет важное значение. личного и даже общественного успеха. Мы предоставляем обзор концептуального статуса задержки… Психология Front. Психол. Высокое качество мотивационной регуляции было связано со снижением негативного влияния мотивационных трудностей на затрачиваемые усилия в процессе обучения, что означает, что мотивационная регуляция может буферизовать конкретные мотивационные проблемы, возникающие в процессе обучения. Психология Психология Психология В этой главе делается попытка охарактеризовать роль воли в саморегулируемом обучении (SRL). Большинство концепций SRL включают аспекты воли и могут даже частично основываться на волевых данных, но… Психология Психология Образование, психология Образование Было проанализировано около 140 исследований, включающих афроамериканскую эмпирическую литературу по мотивации. Обзор был организован вокруг пяти тем, объединенных тремя более широкими предположениями о… содействие внутренней мотивации, социальному развитию и благополучию. Исследования, основанные на теории самоопределения, были сосредоточены на социально-контекстных условиях, которые способствуют, а не препятствуют естественным процессам самомотивации и здорового психологического развития, что привело к постулату о трех врожденных психологических потребностях — компетентности, автономии и родственности. . Люди эмоционально реагируют на свои собственные и чужие действия, часто характерным образом. Характерные эмоциональные реакции и определенные качества темперамента являются примерами психологических процессов, которые являются аффективными. Аффективные процессы включают в себя все чувства и реакции, положительные или отрицательные, связанные с эмоциональным поведением, знаниями или убеждениями. Аффект может изменить восприятие ситуаций, а также результаты когнитивных усилий; он также может подпитывать, блокировать или прекращать познание и поведение. Аффективные процессы переплетаются с аспектами мотивации и воли. В образовательных ситуациях мотивационные убеждения и суждения учащихся о своих способностях влияют на их намерения и планы. Таким образом, учащиеся, считающие себя «плохо разбирающимися в математике», будут предпочитать другие предметы и испытывать трудности на уроках математики. В 1980 году Эрнест Хилгард писал, что основной задачей современной научной психологии должно быть понимание процессов, лежащих в основе трех центральных функций человека — познания (восприятие, память и обработка информации), привязанности и побуждения. Действительно, с начала двадцатого века психология в образовании была переполнена программами исследований качеств и характеристик людей, подпадающих под одну из этих трех функциональных категорий. Еще в середине двадцатого века теории начали определять диапазон переменных внутри и между категориями, которые можно достоверно и надежно измерить у людей. Но, несмотря на значительный прогресс до и после работы Хилгарда в 1980 году, необходимы дополнительные усилия, чтобы объяснить, как триада человеческих функций работает вместе на уровне процесса. Более того, эта исследовательская программа практически неизвестна тем, кто не занимается психологией, и неспециалисты часто не знают, как психологи используют эти термины. Для некоторых целей аффективные и волевые процессы оказались настолько взаимосвязанными, что даже психологам не имеет большого смысла разделять их. Одна группа исследователей, Stanford Aptitude Seminar, изобрела гибридный термин affcon, , чтобы отразить эту точку зрения. Учитывая сложный социокультурный контекст, в котором сегодня проходит школьное обучение, трудно переоценить важность для педагогов, родителей и консультантов понимания того, как изменения аффекта могут влиять на волевые действия и наоборот: и то, и другое играет центральную роль в готовности к работе и качестве. усилий, вложенных студентами в учебу. Три примера служат иллюстрацией того, как взаимодействие между академически-интеллектуальными процессами и процессами общения влияет на цели педагогов-практиков, лиц, принимающих решения, и студентов. Примеры отражают текущие проблемы, а также постоянные проблемы. Школьный класс — это социальный контекст, предлагающий учащимся множество возможностей отвлечься от работы. Частью новой парадигмы обучения является обеспечение учителей набором стратегий для поощрения когнитивной активности. Современная реформа образования делает упор на успех как на награду, но побуждает учителей использовать другие стимулы для продвижения учащихся. Занятия и опыт, основанные на собственных интересах учащихся, а также задания, требующие осмысленного обсуждения тем и материала, способствуют познавательной активности. Эмпирические исследования также поддерживают методы обучения исследованию, которые делают мышление явным и раскрывают скрытые предположения в содержании, начиная от повествований и заканчивая убедительными аргументами. Информация о том, какие реформы и стратегии работают в различных ситуациях, была получена в результате оценок образовательных программ. Часто они демонстрируют недостаточность прямого воздействия на результаты обучения, такие как баллы успеваемости. Скорее, успеваемость улучшается в результате использования аффконных ответов учащихся, когда они участвуют в школьной работе и выполняют ее. Учащийся, который берет на себя ответственность за обучение, саморегулируется и самомотивирован, намеренно направляя энергию на выполнение учебных задач. Самостоятельные стартапы уже давно пожинают академические плоды. Исследования, проведенные в период с 1980 по начало двадцать первого века, выявили установки, навыки и поведение, характеризующие саморегулирующихся учащихся, и подчеркнули важную роль, которую навыки саморегуляции играют в результатах обучения. Саморегулирование и личная ответственность связаны с процессами affcon. Тщательное самоуправление необходимо, когда выполнение поставлено под угрозу; например, когда учащийся испытывает скуку или понимает, что задание будет трудным для выполнения. Тогда на первый план выступают процессы, требующие усилий, которые отмечают волю, со смыслом «пристегнуться». Однако не все академические ситуации требуют волевого контроля. В некоторых видах деятельности в учебной программе обучение может происходить без усилий, почти автоматически. Когда человек находится в аффективном состоянии, которое Михай Чиксентмихайи назвал «потоком», нет необходимости истощать волевые резервы. Проницательные учителя и родители будут внимательно слушать и следить за признаками эмоционального стресса у школьников и поощрять высоко мотивированных детей получать удовольствие от времени между работой и игрой. Все более разнообразный контингент учащихся заставляет учителей дифференцировать учебный план и обучение. Некоторые распространенные стратегии дифференциации оказались неэффективными с академической точки зрения; например, обучение нижней трети класса. Существуют также хорошо задокументированные негативные социальные последствия других стратегий дифференциации, в первую очередь распространенная практика отслеживания и сохранения оценок. Чтобы учесть индивидуальные различия учащихся, учитель должен делать только добро. Некоторые типы совместных рабочих групп, созданные для отражения разнородности учащихся в классах, дают положительные результаты: Учащиеся оказывают и получают помощь от сверстников; они учатся организовывать и управлять сроками; вся группа получает вознаграждение, когда отдельные лица прилагают все усилия. Еще один важный момент, касающийся адаптивного обучения, заключается в том, что хорошие учителя всегда обращаются к ученикам в соответствии с их отношением и стилем работы. Для любой заданной задачи то, что учащийся представляет в виде интереса и отношения, а также предшествующих знаний, часто диктует конкретное объяснение, пример или предложение по улучшению. Различные объяснения, примеры и предложения дойдут до учащихся с другими интересами или резко противоположными стилями поведения. Более того, адаптивное обучение означает смену курса по мере собственного развития учащегося. Несмотря на растущее количество исследований аффективных и волевых процессов в образовании, многие программы остаются разрозненными, даже когда конструкции значительно пересекаются. До сих пор обсуждаются важные теоретические вопросы, в том числе необходимость проведения различий между такими взаимосвязанными понятиями, как мотивация и воля, и точный характер связей в трилогии психических функций Хилгарда. Некоторые уважаемые теоретики, такие как Ричард Сноу и Джулиус Куль, предлагают сложные и ситуативные (контекстно-зависимые) модели, модели, которые предполагают необходимость нового языка, а также новых методов практической оценки и клинического лечения. B ERLINER , D AVID C. и C ALFEE , R OBERT C., ред. 1996. Справочник по педагогической психологии. Нью-Йорк: Макмиллан. C ОХЕН , E ЛИЗАБЕТ . 2001. «Справедливость в школах и классах». В г. «Образование через столетие: столетний том», изд. г. Лин Корно. Чикаго: Национальное общество изучения образования. К ОРНО , Л ЮН . 1993. «Самые продуманные планы: современные концепции воли и образовательных исследований». Исследователь в области образования 22 (2): 14–22. К ОРНО , Л ЮН . 2000. «По-другому взглянуть на домашнюю работу». Журнал начальной школы 100: 529–548. C SIKSZENTMIHALYI , M IHALYI . 1975. За пределами скуки и беспокойства. Сан-Франциско: Джосси-Басс. Г ОЛЕМАН , Д АНИЭЛ . 1997. Эмоциональный интеллект. Нью-Йорк: Бантам. Х ИДИ , С УЗАННЕ ; R ENNINGER , К.А NN ; и K RAPP , A NDREAS . л992. «Современное состояние исследований интересов». В Роль интереса в обучении и развитии, изд. Сюзанна Хиди, К. Энн Реннингер и Андреас Крапп. Хиллсдейл, Нью-Джерси: Эрлбаум. H ILGARD , E RNEST R. 1980. «Трилогия разума: познание, привязанность и воля». Журнал истории поведенческих наук 16: 107–117. К УХЛ , Ж УЛИУС . 2000. «Волевая основа теории взаимодействия систем личности: приложения». В контекстах обучения и лечения. Международный журнал исследований в области образования 33: 665–703. O AKES , J EANNE . 1985. Отслеживание: как школы структурируют неравенство. Нью-Хейвен, Коннектикут: Издательство Йельского университета. P INTRICH , P AUL R., и S ЧАНК , D ALE H. 1996. Мотивация в образовании: теория, исследования и приложения. Энглвуд Клиффс, Нью-Джерси: Прентис-Холл. R ANDI , J UDI и C ORNO , L YN . 1997. «Учителя как новаторы». В International Handbook of Teachers and Teaching, Vol. 2, изд. Брюс Дж. Биддл, Томас Л. Гуд и Айвор Ф. Гудсон. Дордрехт, Нидерланды: Kluwer. R EIGELUTH , C HARLES M., изд. 1999. Теории и модели учебного дизайна: новая парадигма теории обучения, Vol. 2. Махва, Нью-Джерси: Эрлбаум. S ТЭНФОРД A ПИТУД S ЭМИНАР . 2001. Переосмысление концепции способностей: расширение наследия Ричарда Э. Кроме того, H является корректной гибридной системой. Таким образом, для любых T ≥ 0 и t,j∈domϕ, если t + j ≥ T, то t≥τD/1+τDT−1. Мы используем эту границу времени потока, чтобы применить предложение 3.27 Goebel et al. (2012). (2012), деф. 3.6. То, что S̃ является UGpAS для неограниченной системы H, следует из прямой прединвариантности S̃ для H, поскольку для любого решения ϕ для H, если ϕt,j∈S̃, то ϕt′,j′S̃=0 для всех t′,j′ ∈domϕ с t′ ≥ t, j′ ≥ j. Поэтому решения для Hr, которые заканчиваются на границе S̃, могут быть расширены как решения для H, которые остаются в S̃. Отсюда легко заключить, что условие (VC) в предложении 6.10 выполнено для всех x ∈ C\D. Более того, GD⊂C∪D. Таким образом, предложение 6.10 показывает, что максимальное решение либо полно, либо убегает за конечное время, перетекая. ■ 5 Экспериментальные результаты
Протокол A был разработан для исследования того, может ли контроллер уменьшить вариацию частоты педалирования гонщика, ограничивая его частоту педалирования в небольшом диапазоне. Такое испытание обеспечивает точку сравнения с контроллером 3M и неконтролируемым произвольным вращением педалей и генерирует данные, где контроллер более активен. Протокол B был разработан, чтобы показать, как можно уменьшить помощь двигателя, выбрав более широкий безопасный диапазон, тем самым поощряя более сознательный вклад гонщика. На самом деле протокол B имел номинальное сопротивление двигателя, что делало программу более сложной и требовало от гонщика дополнительной выходной мощности. Участники 1-3 были мужчинами, участники 4 и 5 были женщинами, и все они были в возрасте от 21 до 29 лет. 5.1 Испытательный стенд
амплитуда (90 мА, 80 мА и 70 мА для квадрицепсов, подколенных сухожилий и ягодичных мышц соответственно) и частота (60 Гц), а ширина импульса использовалась в качестве управляющего входа. Настольный компьютер с программным обеспечением управления в реальном времени (QUARC, интегрированным с Simulink) использовался для взаимодействия контроллеров и оборудования через плату сбора данных (Quanser QPIDe) с частотой дискретизации 1000 Гц. Для дополнительной безопасности на цикле был установлен аварийный выключатель, позволяющий участнику завершить эксперимент, если это необходимо. 5.2 Процедура
Граница безопасной настройки для контроллера функции шлагбаума была закодирована как e L = − 5 об/мин и e H = 5 об/мин, а e FES = — 3 об/мин. Неактивная область для контроллера 3M составляла 48–52 об/мин, что сравнимо с диапазоном 50–55 об/мин, который использовался для экспериментов в Rouse et al. (2020). Гонщику показывали график его частоты вращения педалей в реальном времени с видимой индикацией заданного значения. Из-за различий между барьерной функцией и контроллерами 3M участникам не показывали границы безопасного набора 11 . (2020) (см. примечание 1 и раздел 5.4). 5.3 Результаты
Дискретное переключение между мотором и ФЭС, наряду с включением границы неактивной зоны, вызвало многочисленные разрывы в работе контроллера мотора 3М; В таблице 1 показано среднее значение 493 переключения за испытание. У всех участников каденс райдеров принимал значения в диапазоне 40,7–56,1 об/мин для контроллера 3М, 45,4–55,3 об/мин для контроллера барьерной функции и 40,5–59,2 об/мин при неконтролируемом педалировании. Контроллер функции барьера ограничивал частоту вращения каждого гонщика заданным пользователем диапазоном 45–55 об / мин в течение всего времени, кроме незначительного; среднее значение шести выборочных точек данных или примерно 0,004% продолжительности испытания. Сегменты испытаний для трех случайно выбранных участников показаны на рис. 2. Увеличенный вид, показывающий ввод стимуляции ФЭС для одного участника, показан на рис. 3. 4 показаны испытания с использованием протокола C, в которых участник №1 не прилагал волевых усилий. Контроллер функции барьера по-прежнему мог удерживать частоту вращения педалей гонщика в пределах безопасного набора, в то время как контроллер 3M вызывал большие колебания; среднее значение частоты ± SD для контроллера 3M составило 43,74 ± 4,9.4 об/мин. Частота вращения педалей упала до 31,54 об/мин во время испытания 3M, потому что электродвигатель был неактивен в заштрихованных областях на рис. большой по сравнению с максимальным значением 8,13 А для контроллера 3M во время испытаний протокола A. 5 и в Таблице 2. Электродвигатель активно использовался для создания резистивного крутящего момента, но низкий вспомогательный крутящий момент. Вспомогательный крутящий момент был меньше, чем в среднем по протоколу А, и, в частности, меньше, чем результаты участника №2. Момент сопротивления был большим, и FES был более активным для протокола B из-за конструкции номинальных контроллеров. Электродвигатель отклонялся от номинального значения всего 7,7 % времени испытания и помогал на протяжении 4,1 % времени испытания. Стандартное отклонение каденса было выше, чем при неконтролируемом произвольном вращении педалей, что, скорее всего, было связано с тем, что управляющие воздействия активно отталкивали гонщика от заданного значения. Вспомогательный крутящий момент от контроллера барьерной функции в протоколе B был сравним с контроллером 3M в испытаниях по протоколу A. Безопасный набор был намного шире для этого запуска, что привело к меньшему отклонению управляющих воздействий от номинального значения. Ненулевые номинальные входы использовались для интенсификации обучения. Данные были собраны с Участником № 2. 5.4 Обсуждение
Для протокола А ширина номинального контрольного диапазона была довольно небольшой, в то время как для протокола В ширина была увеличена9.0003 Использование номинальных контроллеров для Протокола B усилило тренировку, обеспечив большую стимуляцию ФЭС и сопротивление двигателя. Контрольные входные данные были на своих номинальных значениях в течение значительной части эксперимента, подтверждая, что более широкий безопасный диапазон приводит к меньшей модификации номинальных входных данных. В качестве альтернативы номинальные входы могут быть спроектированы таким образом, чтобы сопротивление двигателя было меньше или вход управления в целом был меньше. Тот факт, что вспомогательный крутящий момент от контроллера барьерной функции был сравним с контроллером 3M, предполагает, что ступенчатая поддержка FES перед моторной поддержкой, как в контроллере барьерной функции, является жизнеспособной альтернативой дискретному переключению между FES и управлением двигателем, как в 3M. контроллер. Контроллер 3M является прерывистым всякий раз, когда частота педалирования пересекает границу неактивной зоны или угловое положение пересекает границу областей стимуляции FES Qm. Результирующее большое количество переключателей для контроллера мотора 3M представлено в Таблице 1. Особое преимущество мотора, работающего в областях Qm, заключается в том, что контроллер барьерной функции эффективен, даже когда водитель прилагает мало или вообще не прилагает волевых усилий, как показано на рисунке. в испытаниях с использованием протокола C (рис. 4). Контроллер 3M вызывал большие колебания частоты педалирования гонщика во время протокола C из-за дискретного переключения между FES и управлением двигателем. Поскольку ФЭС не всегда может сам по себе производить достаточный крутящий момент, частота вращения педалей снижалась в областях стимуляции ФЭС, что затем сопровождалось большим управляющим усилием со стороны двигателя при выходе из области. На практике расчет усиления с учетом большого волевого вклада водителя приводит к чрезмерному ограничению водителя во время нормальной работы. Разработка контроллеров для асимптотической устойчивости, а не более слабого свойства прямой инвариантности, помогает смягчить эти эффекты. Свойство, известное как устойчивость от входа к состоянию, которое является следствием результата UCAS в теореме 1, может быть интерпретировано как гарантия того, что некоторое близкое множество будет асимптотически устойчивым, несмотря на неучтенные возмущения ограниченной величины Xu et al. (2015 г.); Кай и Тил (2009 г.)). Таким образом, усиление контроля может быть ослаблено, чтобы способствовать комфортной и эффективной терапии, при этом гарантируя, что частота вращения педалей остается близкой к безопасному набору. 6 Заключение
Используя теоретические достижения для барьерных функций, контроллеры являются минимально инвазивными при постепенном переходе к контроллеру, обеспечивающему безопасность на границе безопасного набора. Входные сигналы управления выбираются из карт регулирования с достаточной регулярностью, чтобы гарантировать, что оптимальные выборы являются локально липшицевыми функциями ошибки частоты вращения педалей. Надежные инструменты управления использовались для разработки карт регулирования, которые являются подмножествами исходной неопределенной карты. Равномерная глобальная асимптотическая устойчивость определяемого пользователем безопасного набора подтверждена анализом гибридной системы. В будущем производительность контроллера может быть улучшена за счет расширения разработки до более полной динамической модели, которая учитывает эффекты активации мышц, такие как электромеханическая задержка в мышцах всадника. Универсальность контроллера была продемонстрирована в испытаниях, преследующих две разные цели: улучшение отслеживания частоты вращения педалей или увеличение выходной мощности гонщика. Важным следующим шагом является проведение более строгих экспериментов на группе участников с неврологическими заболеваниями. У этих всадников снижена способность к волевому участию, поэтому ожидается, что результаты будут значительно отличаться от результатов здоровых всадников и будут представлять интерес для более клинически ориентированной литературы. Заявление о доступности данных
Заявление об этике
Вклад авторов
BA предоставил несколько обзоров рукописи и провел эксперименты. WD и RS предоставили техническое руководство и отредактировали статью. Все авторы внесли свой вклад в доработку рукописи, прочитали и одобрили представленную версию. Финансирование
Конфликт интересов
Примечание издателя
Сноски
Раздел 5.4). В контроллере с барьерной функцией пользователь определяет безопасную границу набора, а вычислимая область отсутствия контроля индуцируется выбором усиления управления, существование которой гарантируется леммой 1.9.0003 Ссылки
(2020). Схемы управления «помощь по мере необходимости» для реабилитационных роботов. Ieee/asme Trans. Мехатрон. 25, 21:00–21:11. doi:10.1109/tmech.2020.2992090 IEEE Trans. контр. Сист. Технол. 28, 2276–2291. doi:10.1109/tcst.2019.2937725 IEEE Trans. киберн. 50, 1084–1095. doi:10.1109/tcyb.2018.2882755 Г., Санфеличе Р. и Тил А. Р. (2012). Гибридные динамические системы . Издательство Принстонского университета. и Диксон В. Е. (2020). «Обнуление функций контрольного барьера для безопасного произвольного вращения педалей в моторизованном цикле», в IFAC Conf. Кибер-физ. Гум.-сист. (IEEE). doi:10.1016/j.ifacol.2021.04.100 Е., и Уэйнрайт, С. Ф. (2011). Езда на велосипеде с функциональной электростимуляцией у взрослого со спастическим диплегическим церебральным параличом. Физ. тер. 91, 970–982. doi:10.2522/ptj.20100286 Automatica 124, 109328. doi:10.1016/j.automatica.2020.109328 IEEE Trans. Робот. 32, 113–124. (2020). Зацикливание FES при инсульте: новый алгоритм с обратной связью учитывает различия в функциональных нарушениях. IEEE Trans. Биомед. англ. 67, 738–749. doi:10.1109/tbme.2019.2920346 и др. (2012). Езда на велосипеде, вызванная функциональной электрической стимуляцией у детей, страдающих церебральным параличом: клинический случай. евро. Дж. Физ. Реабилит. Мед. 48, 135–145. Развитие волевого поведения в дошкольном возрасте на JSTOR
jstor.org/stable/1130566
$19,50/месяц
Годовой план
199 долларов в год Приобрести PDF-файл
Как это работает?
Эти паттерны интерпретируются с точки зрения изменения представлений о действиях, способности к саморегуляции и активного вовлечения себя в действия. Компания John Wiley & Sons, Inc., основанная в 1807 году, уже более 200 лет является ценным источником информации и понимания, помогая людям во всем мире удовлетворять свои потребности и воплощать в жизнь свои стремления. Wiley опубликовал работы более 450 нобелевских лауреатов во всех категориях: литература, экономика, физиология и медицина, физика, химия и мир.
Wiley сотрудничает со многими ведущими мировыми обществами и ежегодно публикует более 1500 рецензируемых журналов и более 1500 новых книг в печатном и онлайн-формате, а также базы данных, основные справочные работы и лабораторные протоколы по предметам STMS. С растущим предложением открытого доступа Wiley стремится к максимально широкому распространению и доступу к контенту, который мы публикуем, и поддерживает все устойчивые модели доступа. Наша онлайн-платформа Wiley Online Library (wileyonlinelibrary.com) — одна из самых обширных в мире многопрофильных коллекций онлайн-ресурсов, охватывающих жизнь, здоровье, социальные и физические науки, а также гуманитарные науки.
Условия использования см. в наших Условиях использования
Развитие ребенка
© 1988 Общество исследований детского развития
Запросить разрешения Волевых потребностей | Агентство и ответственность: избранные эссе
Ссылка
Abstract
Эта глава исследует этот тезис, отличая такие потребности от патологий принуждения и зависимости, которые деформируют нашу волю, а также от того, что можно было бы назвать нормативной и совещательной необходимостью. Оказывается, трактовка феномена Франкфуртом обнаруживает неясность в отношении различных ролей заботы и одобрения в его трактовке агентности. Войти
Получить помощь с доступом
Доступ для учреждений
Если вы являетесь членом учреждения с активной учетной записью, вы можете получить доступ к контенту одним из следующих способов: Доступ на основе IP
Войдите через свое учреждение
Не используйте личную учетную запись Oxford Academic. Войти с помощью читательского билета
Члены общества
Войти через сайт сообщества
Не используйте личную учетную запись Oxford Academic. Вход через личный кабинет
Личный кабинет
Просмотр учетных записей, вошедших в систему
Выполнен вход, но нет доступа к содержимому
Ведение счетов организаций
Покупка
Взятие под контроль исследований в области волевого контроля: вызовы для будущей теории и исследований
title={Возьмем под контроль исследования в области волевого контроля: вызовы для будущей теории и исследований},
автор = {Пол Р.
Пинтрих},
journal={Обучение и индивидуальные различия},
год = {1999},
громкость = {11},
страницы = {335-354}
} Design and implementation of volitional control support in mathematics courses
Воля завершает головоломку: разработка и оценка модели интегративных черт саморегулируемого обучения
Тем не менее, эти теории частично игнорируют… Роль воли в дистанционном обучении: исследование ее возможностей
Эффективность поддержки волеизъявления (VoS) в содействии регулированию усилий и успеваемости учащихся в онлайн-курсе математики
Уточнение конструктов мотивации, регуляции мотивации и воли в моделях саморегулируемого обучения
Однако термины мотивация, регуляция мотивации и… Развитие академической саморегуляции: роль когнитивных и мотивационных факторов
Интегративная модель саморегулируемого обучения для студентов университетов: вклад социально-когнитивной теории носителей
Саморегуляция, культура и академическая задержка вознаграждения
Роль мотивационного регулирования в подготовке к экзамену: результаты стандартизированного дневникового исследования
Эккерляйн, Энн Рот, Тобиас Энгельшалк, Г. Штойер, Б. Шмитц, М. Дрезель Исследования мотивации в письменной форме: теоретические и эмпирические соображения
Поддержание мотивации и регулирования эмоций: измерение индивидуальных различий в академических волевых стратегиях
13013013010130130137 гг.
Corno Саморегуляция: направления и задачи будущих исследований
— контроль убеждений и академических целей в отношении результатов, связанных с достижениями
Связь между мотивационным регулированием старшеклассников и использованием ими стратегий обучения, усилий и успеваемости в классе.
Волевые аспекты мотивации достижения и выученной беспомощности: к комплексной теории контроля действий.
Роль целеполагания в саморегулируемом обучении.
Мотивация у афроамериканцев
Индивидуальные различия — аффективные и волевые процессы — учащиеся, личность, исследования и преподавание
Получение оценки «В» по курсу может вызвать опустошение у встревоженного студента, который ожидал «А». Психологи считают, что темперамент учащегося взаимодействует с ожиданиями в отношении оценки за курс, вызывая негативную эмоциональную реакцию. Воля, древнее психологическое понятие, словарное определение которого относится к целеустремленному стремлению, охватывает ряд мотивационных и волевых процессов, проявляемых человеческими существами. Мотивационные процессы лежат в основе решения преследовать цель; это желания и стремления, которые приводят к намерениям, в свою очередь продиктованным интересом и опытом. Волевые процессы вступают в действие после формирования целей и намерений; эти процессы отражают шаги по реализации целей и способы управления ресурсами. Современная психология стала рассматривать мотивацию и волю как ярлыки категорий для различных волевых процессов. Интеллект, например, является когнитивным, импульсивность — аффективной, а самооценка — волевой. Некоторые хорошо изученные процессы влияют на обязательства и поэтому считаются мотивационными. Одним из примеров является самоэффективность, своего рода вера в личные способности. В другом исследовании изучаются процессы, которые люди используют для защиты уже сформированных обязательств, например, самоконтроль и самовознаграждение. Когда эти процессы происходят после принятия обязательства, они являются волевыми. Cognitive Engagement
В то же время организация занятий требует поведенческого самоконтроля. Это парадоксальное сочетание возможностей и требований указывает на необходимость творческого обучения, которое полностью вовлекает учащихся в работу в классе и побуждает их стремиться к успеху. Концепция когнитивного взаимодействия является важной целью обучения в классе практически на всех уровнях образования. Исследования в области преподавания, проведенные между 1970 и начало двадцать первого века ясно показывают, что учащиеся не обращают внимания на утомительные модели традиционного обучения, когда учащиеся слушают, а учителя говорят. Ответственность учащегося
Исследователи также разработали программы, помогающие более слабым учащимся приобретать знания и навыки саморегуляции. Консультанты и учителя могут использовать такие программы для обучения студентов ответственности. Точно так же родители могут моделировать саморегуляцию и стратегии выполнения домашних заданий. Негативные физиологические, а также эмоциональные изменения могут быть результатом чрезмерного давления на детей в школе. Хотя способность отслеживать и контролировать эмоции увеличивается по мере развития, некоторые различия сохраняются даже у взрослых. Адаптивное обучение
Но даже эффективные групповые мероприятия работают лучше всего в короткие промежутки времени; мотивация и аффект поддерживаются гибкостью. При формировании кооперативных групп преподаватели должны учитывать стили аффективности и саморегуляции учащихся, а также их статусные характеристики и уровни достижений. Исторически сложилось так, что важность учета афкон-профиля студентов не учитывалась при обсуждении и принятии решений по адаптивному обучению. Следовательно, в игру вступает изречение учителя: «Если вы не можете достичь их одним способом, попробуйте другим». Адаптивное обучение требует, чтобы учитель не только обходил наблюдаемые слабости учащихся, но и извлекал выгоду из их сильных сторон. Когда учащегося отстраняют от традиционного обучения в компенсационных целях, должны быть предприняты одновременные усилия по развитию способности непосредственно к традиционному обучению. В конце концов, именно в обычные классы вернутся многие студенты специальных программ. По мере того, как продолжается двадцать первый век, работа в этих направлениях будет продвигаться вперед, что в конечном итоге приведет к появлению совершенно иных способов осмысления аффекта и волевых действий в образовании.